���@���̓L���v�`���[ �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@
 �@�@
�@�@
�@�@�@�L���v�`���[�@�\�͓��͒[�q����̐M�����g���K�[�M���Ƃ��ăg���K�[�M�����͎��̃^�C�}�l���n�[�h�I�ɋL������
�@�@�@�\�ł��B�L���v�`���[�p�̓��͒[�q�y�у^�C�}�͈ȉ��̂悤�ɂȂ��Ă��܂��BdsPIC�̓g���K�[���͒[�q�̖��̂�
�@�@CCPx����ICx�iInput Capture x�j�ɕύX�ɂȂ��Ă��܂��B�܂��AFIFO�o�b�t�@�[���S����܂��BFIFO�o�b�t�@�[�����
�@�@�Ȃ��Ă��Ȃ��Ɗ����݂�������Ȃ��̂œǍ��݂̍ۂ̓o�b�t�@�[����ɂ��Ă����K�v������܂��B
�@�@�@
| PIC�̎�� |
�g���K�[���͒[�q���� |
�^�C�} |
���ԑ���p�O���N���b�N
���͒[�q |
FIFO�o�b�t�@�[ |
| PIC16 |
CCP�� �i�� CCP1�ACCP2) |
�^�C�}�P |
TxCKI (�� T1CKI) |
1 |
| PIC18 |
CCP�� �i�� CCP1�ACCP3) |
�^�C�}�P�܂��̓^�C�}�R |
TxCKI (�� T1CKI�j |
1 |
| ����PIC |
ICx (�� IC1�AIC5) |
�^�C�}�Q�܂��̓^�C�}�R |
- |
4 |
�@�@�@�ȉ��ɃL���v�`���[���g��������Љ�܂��B
�@�i�P�j�@�X�g�b�v�E�H�b�` �@�@�@ �@�@ ��CCS�ҁ�
�@�i�Q�j�@�A����`�g�̃p���X������@ �@�@�@ �@�@ ��CCS�ҁ��@�@�@������PIC�ҁ�
�@�i�R�j�@�d�g���v
�@�@�@�@�@���@���������i�^�C���R�[�h�j�����@�@�@�@�@�@�@��CCS�ҁ�
�@�@�@�@�@���@���������i�^�C���R�[�h�j��ǁ@
�@�@�@�@�@�@�@�@ ������PIC�ҁ�
�@
�i�P�j�X�g�b�v�E�H�b�`�@�@�@��CCS�ҁ�
�@�@�@�@
�@�@������i�d�l��
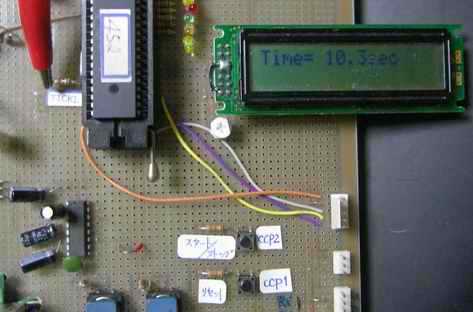
�@�@�@�@�@�@�E�X�^�[�g/�X�g�b�v�{�^���������ƌv�����J�n����B
�@�@�@�@�@�@�E�v�����ɃX�^�[�g/�X�g�b�v�{�^���������ƌv�����������o�ߎ��Ԃ��t���ɕ\������B
�@�@�@�@�@�@�E�t���\���͒P��sec�ŏ����_�ȉ��̗L�������͂P���Ƃ���B�@�@�i��jTime=5.6sec
�@�@�@�@�@�@�E���Z�b�g�{�^���������ƃ��Z�b�g����t���̕\�����hTime=0.0sec�h�ɖ߂�B
�@�@�@�@�@�@�E���Ԃ̌v����10Hz�̊O���N���b�N���g�p���邱�ƁB
�@�@�@
�@�@�@
�@�@������i��H�}��(����H�}��PDF�t�@�C���j
�@�@�@�@PIC�P�WF�S�T�Q���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B
�@
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@ �@�@�@�@
�@�@�@�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
//***********************************************************************************
//�@�@�@�X�g�b�v�E�H�b�`�@�@�@��CCS�ҁ�
//***********************************************************************************
#include "18f452.h"
#use delay(clock=10000000) // 10MH���i�V�X�e���N���b�N���g���j
#FUSES HS,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //rs
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
int Watch_Mode = 0;
unsigned long int Start_time,Stop_time,Count;
float Time = 0;
#int_CCP1 //���Z�b�g�X�C�b�`�M��������@������
void Capture1(void)
{
Watch_Mode = 0; //��v����
lcd_clear();
Time = 0.0;
printf(lcd_data,"Time=%5.1fsec",Time);
}
#int_CCP2 //�X�^�[�g/�X�g�b�v�M��������@������
void Capture2(void)
{
if(Watch_Mode == 0) //��v����
{
Start_time = CCP_2;
Watch_Mode = 1;
}
else //�v����
{
Stop_time = CCP_2;
Watch_Mode = 0;
Count = Stop_time - Start_time;
Time = (float)Count /10;
lcd_clear();
printf(lcd_data,"Time=%5.1fsec",Time);
}
}
main(){
setup_ccp1(CCP_CAPTURE_FE); //������Ńg���K
setup_CCP2(CCP_CAPTURE_FE); //������Ńg���K
setup_timer_1(T1_EXTERNAL_SYNC | T1_DIV_BY_1); //�O���N���b�N�g�p�����N���b�N�Ɠ���������
//���������Ȃ��Ɠǂݏo���Ă���Œ��ɃJ�E���g�A�b�v���Ă��܂�
//�O���N���b�N�@10Hz�@�iat�@T1CKI/RC0)
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"Stop Watch !!");
delay_ms(2000);
enable_interrupts(INT_CCP1);
enable_interrupts(INT_CCP2);
enable_interrupts(GLOBAL);
while(1) //CCP�����݂�҂�
{
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
�@�����쌋�ʁ�
�@�@�@�s�̂̃X�g�b�v�E�H�b�`�Ɠ����ɖ�10�b�� Start/Stop���삳�������̎ʐ^�ł��B����������O�ʼnE����������
�@�@�ʐ^�ł��B�@�O���N���b�N���t�@���N�V�����W�F�l���[�^�iGW INSTEC�@SFG-2104�j�����10Hz��`�g�ł��B�@
| ����O |
|
��10�b����� |
 |
|
 |
�i�Q�j�A����`�g�̃p���X������
�@��CCS�ҁ�
�@������i�d�l��
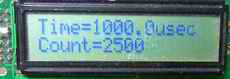
�@�@�E�@CCP1�ACCP�Q�@�L���v�`���[���͒[�q�ɓ��͂��ꂽ��`�g��High���x�����̃p���X���𑪒肵�t���̂P�s�ڂ�
�@�@�@�\������B
�@�@�E�@�t���̂Q�s�ڂɂ͓����N���b�N�̃J�E���g����\������B�@�i��j�@Count=333
�@������i��H�}���i����H�}��PDF�t�@�C���j
�@�@PIC18F452���g��������Љ�܂��B
�@
�@������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�

�@���v���O�����၄
//***********************************************************************************
//�p���X������@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@��CCS�ҁ�
//CCP1 : �p���X�����オ��
//CCP2�@�F�@�p���X������
//***********************************************************************************
#include "18f452.h"
#use delay(clock=10000000) // 10MH���i�V�X�e���N���b�N���g���j
#FUSES HS,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //rs
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
unsigned long int rise,fall,pulse_Count;
float pulse_width;
#int_CCP2 //���Z�b�g�X�C�b�`���쎞
void interval(void)
{
disable_interrupts(INT_CCP2); // Setup interrupt on falling edge
disable_interrupts(GLOBAL);
rise = CCP_1; //�p���X�g�`�����オ�莞�̃^�C�}�P�̃J�E���g��
fall = CCP_2; //�p���X�g�`�������莞�̃^�C�}�P�̃J�E���g��
pulse_Count = fall - rise;
pulse_width = (float)pulse_Count*0.4; //�P��[��sec�n�@�@�P�J�E���g=0.4��sec
lcd_clear();
printf(lcd_data,"Time=%5.1fusec",pulse_width);
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data,"Count=%lu",pulse_Count);
delay_ms(1000);
enable_interrupts(INT_CCP2); // Setup interrupt on falling edge
enable_interrupts(GLOBAL);
}
main(){
setup_ccp1(CCP_CAPTURE_RE); //���オ��Ńg���K
setup_CCP2(CCP_CAPTURE_FE); //������Ńg���K
setup_timer_1(T1_INTERNAL); //�����N���b�N�g�p
//���������Ȃ��Ɠǂݏo���Ă���Œ��ɃJ�E���g�A�b�v���Ă��܂�
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"Stop Watch !!");
delay_ms(2000);
lcd_clear();
printf(lcd_data,"Time=%5.1fusec",pulse_width);
enable_interrupts(INT_CCP2); // Setup interrupt on falling edge
enable_interrupts(GLOBAL);
while(1) //CCP�����݂�҂�
{
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
�����쌋�ʁ�
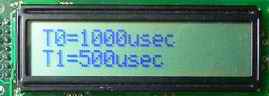
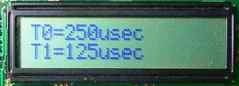
�@�@�@���͐M���Ƃ���Duty=�T�O���́@500Hz��2KHz�̋�`�g��CPP1�ACPP2�ɓ��͂������̉t����ʂ̎ʐ^�������܂��B
�@Time�̓p���X��High�̎��ԕ� [�P�ʁF��sec] �ł��B
�@�@���A���̓p���X�̓t�@���N�V�����W�F�l���[�^�iGW�@INSTEC�@SFG-2104�j����̋�`�g�ł�
�@�@�@�@
�@�@
| 500Hz���͎� |
|
2KHz���͎� |
 |
|
 |
��dsPIC�ҁ��@�@�@PIC30F2012
�@������i�d�l��
�@�@�E�@IC1�AIC�Q�@�L���v�`���[���͒[�q�ɓ��͂��ꂽ��`�g�̎������t���̂P�s�ڂɕ\������B�@
�@�@�@�@�@�@�@�@�i��j�@T0=300usec
�@�@�E�@�Q�s�ڂɂ̓p���X��High���x�����̎��ԕ��𑪒肵�\������B
�@�@�@�@�@�@�@�@�i��j�@T1=100usec
�@������i��H�}���i����H�}��PDF�t�@�C���j
�@�@�@dsPIC30F2012���g��������Љ�܂��B
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
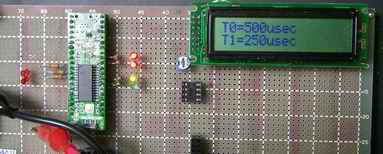
�@���v���O�����၄�@�@�@�@�@�@�@�@��dsPIC�ҁ�
///************************************************************/
//* �C���v�b�g�L���v�`���[�ɂ������A�p���X�����o
//* dsPIC30F2012
//************************************************************/
// MPLAB�@�v���W�F�N�g�ւ̒lj��t�@�C��
// Linker Script�t�H���_�@ p30f2012.gld
// Library Files�t�H���_�@ lib30F2012-coff.a
#include "p30f2012.h"
#include <stdio.h>
#include <InCap.h>
#include <timer.h>
#include "1lcd_lib_C30.h"
_FOSC(CSW_FSCM_OFF & // �N���b�N��ւ��Ȃ��A�t�F�[�X�Z�C�t�N���b�N���j�^�Ȃ�
XT_PLL8 //�O�����U�q�F10MHz�APLL�F8�{�@���@�V�X�e���N���b�N���g����10�~8��80MHz
);
_FWDT(WDT_OFF);
_FBORPOR(PBOR_ON & //�u���E���A�E�g���Z�b�g�@�\�FON
BORV_42 & //�u���E���A�E�g�d���F4.2V
PWRT_64 & //�p���[�I�����Z�b�g�^�C�}64msec
MCLR_EN //MCLR�@�\�FON
);
_FGS(CODE_PROT_OFF); //�R�[�h�v���e�N�g�FOFF
int Ver = 789,Count=0;
char Buf1[21];
//������̃o�b�t�@�[�p���W�X�^
unsigned int FirstEdge_Rise,SecondEdge_Rise,FirstEdge_Fall,T0,T1,dumy;
char dumyC;
void delay_ms(unsigned int);
void delay_ms(unsigned int N) //�E�F�C�g��
{
__delay32(Clock/4000*N);
}
void _ISR _IC2Interrupt(void) //�Q��̗����オ��G�b�W���Ɋ����ݔ���
{
ReadCapture1(&FirstEdge_Fall);
ReadCapture2(&FirstEdge_Rise);
ReadCapture2(&SecondEdge_Rise);
T0 =(unsigned int) (((float)(SecondEdge_Rise - FirstEdge_Rise))*0.4); // �p���X�̎���
// �J�E���g�N���b�N�̎����i1/Fosc�~4) ��T = 1/80 �~4�~8�i�v���X�P�[���j�@=0.4��sec
T1 =(unsigned int) (((float)(FirstEdge_Rise - FirstEdge_Fall))*0.4);
//�p���X��High�i�P�j�̎���
do
{
ReadCapture2(&dumy); //FIFO�o�b�t�@�N���A�@���@FIFO�o�b�t�@����iIC2CONbits.ICBNE=0�j��
}while(IC2CONbits.ICBNE); //�Ȃ�Ȃ��Ǝ��̊��荞�݂͂�����Ȃ�
TMR2 = 0; //�^�C�}�Q�̃J�E���g�l���Z�b�g��0
IFS0bits.IC2IF = 0; //
}
/// ���C����
int main(void)
{
TRISB = 0;
TRISF = 0;
TRISD = 0xFFFF;
dumyC =' ';
ConfigIntCapture2(IC_INT_PRIOR_5 & IC_INT_ON); // IPC1bits.IC2IP = 5;
OpenTimer2(T2_ON & T2_GATE_OFF & T2_PS_1_8 & T2_SOURCE_INT, 65000-1);
//���샂�[�h�ݒ背�W�X�^ IC2CON�̐ݒ�
OpenCapture1(IC_IDLE_STOP & //Idle����~
IC_TIMER2_SRC & //�^�C�}2�ő���
IC_INT_2CAPTURE & //�L���v�`���[2��Ŋ����ݔ���
IC_EVERY_FALL_EDGE //����������G�b�W���ɃL���v�`���[
);
OpenCapture2(IC_IDLE_STOP & //Idle����~
IC_TIMER2_SRC & //�^�C�}2�ő���
IC_INT_2CAPTURE & //�L���v�`���[2��Ŋ����ݔ���
IC_EVERY_RISE_EDGE //�����オ��G�b�W���ɃL���v�`���[
);
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf1,"Capture %d",Ver); //arguement���Ȃ��ƒx�� C30�̃o�O�H
lcd_str(Buf1); //�t���\��
delay_ms(1000);
EnableIntIC2; //�������@IEC0bits.IC2IE = 1;�@
while(1) //Capture�����݂�҂�
{
lcd_clear();
//�t���\��
sprintf(Buf1,"T0=%uusec",T0); //
lcd_str(Buf1);
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf1,"T1=%uusec",T1); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_str(Buf1);
Count++;
delay_ms(1000);
}
CloseCaptre2();
return 0;
}
//*********************************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή��A�y�ѕ��U�|�[�g�Ή����ŕύX�����������̂ł��B
//*********************************************************************************************
#include "p30f4013.h"
#define Clock 80000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATBbits.LATB12 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATBbits.LATB11 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATBbits.LATB10 //LCD��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATBbits.LATB9 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATFbits.LATF0 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATFbits.LATF1 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//********************************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή��A�y�ѕ��U�|�[�g�Ή����ŕύX�����������̂ł��B
//********************************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C30�R���p�C���[
// �������͈ȉ�
//�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C30.h"
unsigned int _1usec; // 1��sec�҂ɕK�v�ȃE�F�C�g��
unsigned int _50usec; //50��sec�҂ɕK�v�ȃE�F�C�g��
unsigned long N_msec; // 1msec�҂ɕK�v�ȃE�F�C�g��
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
__delay32(_1usec); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
__delay32(_1usec); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
__delay32(2*N_msec); // 2msec�҂�
else
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
// __delay32(15*N_msec); //15msec�E�F�C�g
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
_1usec =(unsigned int)( Clock / 4000000); // 1��sec�ɗv����E�F�C�g��
//__delay32(N) �F N��11�ȉ��̏ꍇ�ł�11��E�F�C�g
_50usec = (unsigned int)(Clock / 4000000 * 50); //50��esc�ɗv����E�F�C�g��
N_msec = (unsigned long int)(Clock / 4000); // 1msec�ɗv����E�F�C�g��
// = Clock / 4000000*1000
__delay32(20*N_msec); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(5*N_msec); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
�@�����쌋�ʁ�
�@�@IC1�AIC2����̓��̓p���X�iDuty=�T�O���j���PKH���A�QKH���A�SKH���̎��̉t����ʂ̎ʐ^���ȉ��Ɏ����܂�
�@���̓p���X���t�@���N�V�����W�F�l���[�^�iINSTEC�@SFG-2104�j����̋�`�g�ł��B�@
�@�i�R�j�d�g���v
�@�@ ���@���������i�^�C���R�[�h�j����
�@�@�@�@�@�@�@PIC�Ń^�C���R�[�h����������Љ�܂��B
�@�@�@������i�d�l��
�@�@�@�@�E�@JJY�Ɠ��d�l�̃^�C���R�[�h������B
�@�@�@�@�E�@�o�͂��Ă���^�C���R�[�h�����t���ɕ\������B
�@�@�@�@�E�@�o�͂���@�N���������b���X�C�b�`�Őݒ�ł���B
�@�@
�@�@�@������i��H�}���i����H�}��PDF�t�@�C���j
�@�@�@PIC18F4550���g��������Љ�܂��B
�@
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂��B
�@�@�@�@�@�@�@�@�@�@�@�����̉t�����ڂ�����́@�d�g���vVer.2 �L�b�g�i�������F�i�L�j�g���C�X�e�[�g�@�̔����F�H���d�q�ʏ��j
�@�@�@�@�@�@�@�@�@�@�@�̃^�C���R�[�h��ǁE�\����ł��B
�@���v���O�����၄�@�@�@�@�@�@�@�@��CCS�ҁ�
//*****************************************************************************
//JJY �d�g���v�p�^�C���R�[�h
//�@�@�@�@�@�@�@�@�@�@�@ �����v���O�����@�@�@�@ �@PIC18F4550
//*****************************************************************************
#include <18F4550.h>
#use delay(clock=20000000)
#FUSES HS,PUT,NOWDT,BROWNOUT,BORV43,NOPROTECT,NOLVP
//////// Port define and link LCD library
#define mode 0
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //chip select
#define stb PIN_D0 //strobe
#include "1lcd_lib.c"
long int Count_25msec = 0,Count_100msec = 0;
signed long int Sec = 0,Min = 0,H = 0,Week,Month = 11;
unsigned long int Day = 3,Year = 2007;
int32 Day_total,Day_Year,Day_This_Year;
unsigned long int Day1,Day2,Day3,Day4,Day5,Day6,Day7,Day8,Day9,Day10,Day11,Day12;
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ //Year�N�̂P���P������e���܂ł̓����v
short int OutputMode = 1; //1:�^�C���R�[�h�o�̓��[�h 0:�N���������b �ݒ胂�[�h
int swCount_Mode = 0,swCount_Select = 0,swCount_Up = 0,swCount_Down = 0;
int SelectMode = 0; // �ݒ胂�[�h�@���@0:�N�@1�F���@2�F���@3�F���@4�F���@���̑��F�b
char Sun[] = "Sun.";
char Mon[] = "Mon.";
char Thues[] = "Thues.";
char Wed[] = "Wed.";
char Thurs[] = "Thurs.";
char Fri[] = "Fri.";
char Sat[] = "Sat.";
char str[];
char str_Mode[10];
int Out = 0,PAm,PAh;
void WeekFunc() //Year�AMonth�ADay����@���̓������j���������߂��
{
unsigned long int i,Year1,Day_Feb,Weekx;
// 2000�N����(Year -1)�N�܂ł̓����v�Z-----------------------------------------------------
Day_Year = 0;
for(i = 2000; i < Year; i++)
{
if((((i % 4) == 0) && ((i % 100) != 0)) ||�@�@ �@//100�Ŋ����Ȃ��łS�Ŋ���鐼��N�͂��邤�N�ł���B
((i % 900) == 200) || �@//�A���A900�Ŋ����������܂肪200�܂��́A600�̐���N��
((i % 900) == 600)) �@//���邤�N�ł���B�i���胆���E�X��j
{
Year1 = 366;
}
else Year1 = 365;
Day_Year = Day_Year + (int32)Year1;
}
//Year�N�̗v�����v�Z-----------------------------------------------------------------------
//�Q���̓����v�Z
if((((Year % 4) == 0) && ((Year % 100) != 0)) || //100�Ŋ����Ȃ��łS�Ŋ���鐼��N�͂��邤�N�ł���B
((Year % 900) == 200) || //�A���A900�Ŋ����������܂肪200�܂��́A600�̐���N��
((Year % 900) = //���邤�N�ł���B�i���胆���E�X��j
{
Day_Feb = 29;
}
else Day_Feb = 28;
Day1 = Day;
Day2 = Day1 + 31;
Day3 = Day2 + Day_Feb;
Day4 = Day3 + 31;
Day5 = Day4 + 30;
Day6 = Day5 + 31;
Day7 = Day6 + 30;
Day8 = Day7 + 31;
Day9 = Day8 + 31;
Day10 = Day9 + 30;
Day11 = Day10 + 31;
Day12 = Day11 + 30;
switch(Month)
{
case 1: //�P���̏ꍇ
Day_This_Year = Day1;
break;
case 2: //�Q���̏ꍇ
Day_This_Year = Day2;
break;
case 3:
Day_This_Year = Day3; �@�@�@�@�@�@�@�@//�R���̏ꍇ
break;
case 4:
Day_This_Year = Day4; �@�@�@�@�@�@�@�@//�S���̏ꍇ
break;
case 5:
Day_This_Year = Day5; �@�@�@�@�@�@�@�@//�T���̏ꍇ
break;
case 6:
Day_This_Year = Day6; �@�@�@�@�@�@�@�@//�U���̏ꍇ
break;
case 7:
Day_This_Year = Day7; �@�@�@�@�@�@�@�@//�V���̏ꍇ
break;
case 8:
Day_This_Year = Day8; �@�@�@�@�@�@�@�@//�W���̏ꍇ
break;
case 9:
Day_This_Year = Day9; �@�@�@�@�@�@�@�@ //�X���̏ꍇ
break;
case 10:
Day_This_Year = Day10; �@�@�@�@�@�@�@�@//�P�O���̏ꍇ
break;
case 11:
Day_This_Year = Day11; �@�@�@�@�@�@�@�@ //�P�P���̏ꍇ
break;
case 12:
Day_This_Year = Day12; �@�@�@�@�@�@�@�@//�P�Q���̏ꍇ
break;
default: break;
}
//2000�N�P���P���i�y�j���� Year�NMo��th��Day���Ԃł̗v����Day_total ----------------------------------------
Day_total = Day_This_Year + Day_Year;
//�@Year�N�̗v�����@�{�@2000�N1��1������@�i�@Year - �P�j�N12��31���܂ł̓����v
Weekx = (unsigned long int)( Day_total % 7);
switch(Weekx)
{
case 0: //���j��
str = Fri;
Week = 5;
break;
case 1: //�y�j��
str = Sat;
Week = 6;
break;
case 2: //���j��
str = Sun;
Week = 0;
break;
case 3: //���j��
str = Mon;
Week = 1;
break;
case 4: //�Ηj��
str = Thues;
Week= 2;
break;
case 5: //���j��
str = Wed;
Week = 3;
break;
case 6: //�ؗj��
str = Thurs;
Week = 4;
break;
default: break;
}
}
void MonthFunc()�@�@�@�@//�@��������������iDay���{�P�������j�̌��iMonth�j�����߂��
{
if(Month == 2) //2���̏ꍇ
{
//���邤�N�̏ꍇ
if(((Year % 4 == 0) && (Year % 100 != 0)) || //100�Ŋ����Ȃ��łS�Ŋ���鐼��N�͂��邤�N�ł���B
(Year % 900 == 200) || //�A���A900�Ŋ����������܂肪200�܂��́A600�̐���N��
(Year % 900 == 600)) //���邤�N�ł���B�i���胆���E�X��j
{
if(Day >= 30)
{
Day = 1;
Month++;
}
}
else //���邤�N�łȂ��ꍇ
{
if(Day >= 29)
{
Day = 1;
Month++;
}
}
}
else if(Month == 12) //12���̏ꍇ
{
if(Day >= 32)
{
Day = 1;
Month = 1;
Year++;
}
}
else if( (Month == 4) || (Month == 6) || //4�A6�A9�A11���̏ꍇ
(Month == 9) || (Month == 11) )
{
if(Day >= 31)
{
Day = 1;
Month++;
}
}
else //2�A4�A6�A9�A11�A12���ȊO�̌�
{
if(Day >= 32)
{
Day = 1;
Month++;
}
}
}
void YearFunc() //�@��������������iYear�N�̗v����Day_This_Year���{�P�������j�̔N�iYear�j�����߂��
//���邤�N�̏ꍇ
if(((Year % 4 == 0) && (Year % 100 != 0)) || //100�Ŋ����Ȃ��łS�Ŋ���鐼��N�͂��邤�N�ł���B
(Year % 900 == 200) || //�A���A900�Ŋ����������܂肪200�܂��́A600�̐���N��
(Year % 900 == 600)) //���邤�N�ł���B�i���胆���E�X��j
{
if(Day_This_Year >= 367) //Year�N�̗v������367�������ꍇ
{
Day = 1;
Year++;
}
}
else //���邤�N�ȊO
{
if(Day_This_Year >= 366) //Year�N�̗v������366�������ꍇ
{
Day = 1;
Year++;
}
}
}
void TimeCode() //�^�C���R�[�h�̃p���X�i�p���X���j�����߂��
{
unsigned long int i;
unsigned long int Temp1,Temp2,Temp3;
unsigned long int Temp16,tempYear;
//(1) �S�^�C���R�[�h�p���X�̗����オ��M���i�Psec����Out=1�j
for(i = 0; i < 60; i++) if(Count_100msec == i*10)Out = 1;
//(2)�@�}�[�J�[�iM)�M��OFF�^�C�~���O����@�@�p���X��200msec
if(Count_100msec == 2)Out = 0; �@�@�@�@�@�@�@�@�@�@ //�擪�}�[�J�[�iM)off
//(3)�@�|�W�V�����}�[�J�iP0�`P5)�M��OFF�^�C�~���O����@�p���X��200msec
for(i = 0; i < 6; i++)
{
if(Count_100msec == (i * 100 + 92) )Out = 0; //�|�W�V�����}�[�J�[P0~P5 off
}
//(4) 0�`10sec�F ���f�[�^�M���o�̓^�C�~���O����
Temp2 = (unsigned long int)Min / 10; //10�i�Q���ځiBCD) :3�r�b�g
Temp1 = (unsigned long int)Min % 10; //10�i�P���ځiBCD)�@�F4�r�b�g
Temp16 = (Temp2 << 5) + Temp1; //16�r�b�g�̑��M��������쐬
Temp16 = Temp16 & 0b1111111111101111; //��S�r�b�g�ɂO���Z�b�g
Temp16 = Temp16 << 8; //MSB�ɐ擪�f�[�^�r�b�g���ړ�
//�p���e�B�v�Z�i�����j
PAm =bit_test (Temp2,2)^bit_test(Temp2,1)^bit_test(Temp2,0)
^bit_test(Temp1,3)^bit_test(Temp1,2)^bit_test(Temp1,1)^bit_test(Temp1,0);
for(i = 1; i < 9; i++) //MSB����8bit���o
{
if( (Count_100msec == (10*i + 5)) && ((0x8000 & Temp16) != 0) )Out = 0;//�P�̏ꍇ�@15�`85
if( (Count_100msec == (10*i + 8)) && ((0x8000 & Temp16) == 0) )Out = 0;//�O�̏ꍇ�@18�`88
Temp16 = (Temp16 << 1);
}
//�i5�j�@10�`20sec�F�@���ԃf�[�^�M���o�̓^�C�~���O����
Temp2 = (unsigned long int)H /10; //10�i�Q���ځiBCD)�@�F2�r�b�g
Temp1 = (unsigned long int)H % 10; //10�i�P���ځiBCD)�@:4�r�b�g
Temp16 = (Temp2 << 5) + Temp1; //16�r�b�g�̑��M��������쐬
Temp16 = Temp16 & 0b1111111001101111; //��4�ʂƑ�V�C�W�ʂɂO���Z�b�g
Temp16 = (Temp16 << 7); //MSB�ɐ擪�f�[�^�r�b�g���ړ�
//�p���e�B�v�Z�i�����j
PAh = bit_test(Temp2,1)^bit_test(Temp2,0)
^bit_test(Temp1,3)^bit_test(Temp1,2)^bit_test(Temp1,1)^bit_test(Temp1,0);
for(i = 0; i < 9; i++) //MSB����9�r�b�g���o
{
if( (Count_100msec == (10*i + 105)) && ((0x8000 & Temp16) != 0) )Out = 0; //�P�̏ꍇ
if( (Count_100msec == (10*i + 108)) && ((0x8000 & Temp16) == 0) )Out = 0; //�O�̏ꍇ
Temp16 = (Temp16 << 1);
}
//(6) 20�`30sec�F�@���f�[�^�M���o�̓^�C�~���O����(1)
Temp3 = (unsigned long int)Day_This_Year / 100; //10�i�R���ځiBCD)�@�F2�r�b�g
Temp2 = ((unsigned long int)Day_This_Year % 100) / 10; //10�i�Q���ځiBCD)�@4�F�r�b�g
Temp1 = ((unsigned long int)Day_This_Year % 100) % 10; //10�i�P���ځiBCD)�@4�F�r�b�g
Temp16 = (Temp3 << 5) + Temp2;�@ //16�r�b�g�̑��M��������쐬
Temp16 = Temp16 & 0b1111111001101111; //��4�ʂƑ�V�C�W�ʂɂO���Z�b�g
Temp16 = (Temp16 << 7); //MSB�ɐ擪�f�[�^�r�b�g���ړ�
for(i = 0; i < 9; i++) //MSB����9�r�b�g���o
{
if( (Count_100msec == (10*i + 205)) && ((0x8000 & Temp16) != 0) )Out = 0; //�P�̏ꍇ
if( (Count_100msec == (10*i + 208)) && ((0x8000 & Temp16) == 0) )Out = 0; //�O�̏ꍇ
Temp16 = (Temp16 << 1);
}
//(7) 30�`40sec�F�@���f�[�^�M���o�̓^�C�~���O����(2)
Temp16 = (Temp1 << 5) + (PAh << 2) + (PAm << 1);
Temp16 = Temp16 & 0b1111111111100111; //��3�ʂ�4�ʂɂO���Z�b�g
Temp16 = (Temp16 << 7);//MSB�ɐ擪�f�[�^�r�b�g���ړ�
for(i = 0; i < 9; i++)//MSB����9�r�b�g���o
{
if( (Count_100msec == (10*i + 305)) && ((0x8000 & Temp16) != 0) )Out = 0; //�P�̏ꍇ
if( (Count_100msec == (10*i + 308)) && ((0x8000 & Temp16) == 0) )Out = 0; //�O�̏ꍇ
Temp16 = (Temp16 << 1);
}
//(8) 40�`50sec�F�@����N�M���i����Q���j
TempYear = Year % 100; //����͉��Q���̂ݑ��M
Temp2 = TempYear / 10; //10�i�Q���ځ@�F4�r�b�g
Temp1 = TempYear % 10; //10�i�P���ځ@�F4�r�b�g
Temp16 = (Temp2 << 4) + Temp1; //16�r�b�g�̑��M��������쐬 (�\���r�b�g=0�j
Temp16 = (Temp16 << 7); //MSB�ɐ擪�f�[�^�r�b�g���ړ�
for(i = 0; i < 9; i++)
{
if( (Count_100msec == (10*i + 405)) && ((0x8000 & Temp16) != 0) )Out = 0; //�P�̏ꍇ
if( (Count_100msec == (10*i + 408)) && ((0x8000 & Temp16) == 0) )Out = 0; //�O�̏ꍇ
Temp16 = (Temp16 << 1);
}
//(9) 50�`60sec�F�@�j���A���邤�N�A�\���M������
Temp2 = (unsigned long int)Week; //�j���@10�i�P���@�@�@�@�F3�r�b�g
//0�F���j���@1�F���j���@2�F�Ηj���@3�F���j���@4�F�ؗj���@5�F���j���@6�F�y�j��
Temp1 = 0x00; //���邤�b�A�\�� :6�r�b�g
Temp16 = Temp16 = (Temp2 << 6) + (Temp1 << 4); //16�r�b�g�̑��M��������쐬
Temp16 = Temp16 & 0b1111111111110000; //��O�`�R�ʂɂO���Z�b�g
Temp16 = (Temp16 << 7); //MSB�ɐ擪�f�[�^�r�b�g���ړ�
for(i = 0; i < 9; i++)
{
if( (Count_100msec == (10*i + 505)) && ((0x8000 & Temp16) != 0) )Out = 0; //�P�̏ꍇ
if( (Count_100msec == (10*i + 508)) && ((0x8000 & Temp16) == 0) )Out = 0; //�O�̏ꍇ
Temp16 = (Temp16 << 1);
}
if(Out == 1)output_high(PIN_E2); //�@�^�C���R�[�h�o�́@�F�@�h�P"�@���@High
if(Out == 0)output_low(PIN_E2); //�@�^�C���R�[�h�o�́@�F�@�h�O�h�@���@Low�@
}
void time_output() //�@�^�C���R�[�h�o�̓��[�h�i100msec���j
{
TimeCode(); //�^�C���R�[�h���o��
Sec = Count_100msec / 10;
Count_100msec++;
if(Count_100msec >= 600)
{
Count_100msec = 0;
Min++;
if(Min >= 60)
{
Min = 0;
H++;
if(H >= 24)
{
H = 0;
Day++;
WeekFunc();
MonthFunc();
YearFunc();
}
}
}
}
void sw_check() //�e�X�C�b�`���o�A���[�h�����
{
//���[�h�Z�b�g�X�C�b�`���o-------------------------------------------------------
if(input(PIN_A2) == 0)swCount_Mode++; //RA2�̃��[�h�X�C�b�`��������Ă����ꍇ
else swCount_Mode = 0;
if(swCount_Mode == 4) //25msec����4��X�C�b�`ON���A�����o���ꂽ�ꍇ
{
if(OutputMode == 1) //�^�C�}�R�[�h�o�̓��[�h
{
OutputMode = 0; //�^�C���R�[�h�o�̓��[�h�̏ꍇ�@���@�����ݒ胂�[�h
SelectMode = 0; //����N�ݒ胂�[�h�ɃZ�b�g
}
else OutputMode = 1; //�����ݒ胂�[�h�̏ꍇ�@���@�^�C���R�[�h�o�̓��[�h�ɃZ�b�g
}
if(swCount_Mode >= 5)swCount_Mode = 5; //�X�C�b�`��������Â���ꂽ�ꍇ��
//�Z���N�g�X�C�b�`���o-------------------------------------------------------
if((input(PIN_A3) == 0) && (OutputMode == 0))swCount_Select++; //RA3�̃Z���N�g�X�C�b�`��������Ă����ꍇ
else swCount_Select = 0;
if(swCount_Select == 4) //25msec����4��X�C�b�`ON���A�����o���ꂽ�ꍇ
{
if(SelectMode == 0)SelectMode = 1; //����N�ݒ胂�[�h�̏ꍇ�@���@���ݒ胂�[�h
else if(SelectMode == 1)SelectMode = 2; //���ݒ胂�[�h�̏ꍇ�@���@���ݒ胂�[�h
else if(SelectMode == 2)SelectMode = 3; //���ݒ胂�[�h�̏ꍇ�@���@���ݒ胂�[�h
else if(SelectMode == 3)SelectMode = 4; //���ݒ胂�[�h�̏ꍇ�@���@���ݒ胂�[�h
else if(SelectMode == 4)SelectMode = 5; //���ݒ胂�[�h�̏ꍇ�@���@�b�ݒ胂�[�h
else SelectMode = 0; //�b�ݒ胂�[�h�̏ꍇ�@���@����N�ݒ胂�[�h
}
if(swCount_Select >= 5)swCount_Select = 5; //�X�C�b�`��������Â���ꂽ�ꍇ��
//�A�b�v�X�C�b�`���o---------------------------------------------------------------
if((input(PIN_A5) == 0) && (OutputMode == 0))swCount_Up++; //RA5�̃A�b�v�X�C�b�`��������Ă����ꍇ
else swCount_Up = 0;
if(swCount_Up == 4) //25msec����4��X�C�b�`ON���A�����o���ꂽ�ꍇ
{
if(SelectMode == 0)Year++; //����N�ݒ胂�[�h�̏ꍇ�@
else if(SelectMode == 1) //���ݒ胂�[�h�̏ꍇ�@
{
Month++;
if(Month >= 12)Month = 12;
}
else if(SelectMode == 2) //���ݒ胂�[�h�̏ꍇ�@
{
Day++;
if( (Month == 4) || (Month == 6) || //4�A6�A9�A11���̏ꍇ
(Month == 9) || (Month == 11) )
{
if(Day >= 31)Day = 30;
}
else if(Month == 2) //2���̏ꍇ
{
//���邤�N�̏ꍇ
if(((Year % 4 == 0) && (Year % 100 != 0)) || //100�Ŋ����Ȃ��łS�Ŋ���鐼��N�͂��邤�N�ł���B
(Year % 900 == 200) || //�A���A900�Ŋ����������܂肪200�܂��́A600�̐���N��
(year % 900 == 600)) //���邤�N�ł���B�i���胆���E�X��j
{
if(Day >=30)Day = 29;
}
else //���邤�N�ȊO
{
if(Day >=29)Day = 28;
}
}
else //�P���A�R���A�T���A�V���A�W���A�P�O���A�P�Q���̏ꍇ
{
if(Day >= 32)Day = 31;
}
}
else if(SelectMode == 3) //���ݒ�̏ꍇ
{
H++;
if(H >= 24)H = 23;
}
else if(SelectMode == 4) //���ݒ�̏ꍇ
{
Min++;
if(Min >= 60)Min = 59;
}
else //�b�ݒ�̏ꍇ
{
Sec++;
Count_100msec = Count_100msec + 10;
Count_25msec = 0;
if(Sec >= 60)
{
Sec = 59;
Count_100msec = 590;
}
}
WeekFunc();
}
if(swCount_Up >= 5)swCount_Up = 5; //�X�C�b�`��������Â���ꂽ�ꍇ��
//�_�E���X�C�b�`���o---------------------------------------------------------------
if((input(PIN_E0) == 0) && (OutputMode == 0))swCount_Down++; //RA3�̃Z���N�g�X�C�b�`��������Ă����ꍇ
else swCount_Down = 0;
if(swCount_Down == 4) //25msec����4��X�C�b�`ON���A�����o���ꂽ�ꍇ
{
if(SelectMode == 0) //����N�ݒ胂�[�h�̏ꍇ�@
{
Year--;
if(Year <= 1999)Year = 2000;
}
else if(SelectMode == 1) //���ݒ胂�[�h�̏ꍇ
{
Month--;
if(Month <= 0) Month = 1;
}
else if(SelectMode == 2) //���ݒ胂�[�h�̏ꍇ
{
Day--;
if(Day <= 0) Day = 1;
}
else if(SelectMode == 3) //���ݒ胂�[�h�̏ꍇ�@
{
H--;
if(H <= -1)H = 0;
}
else if(SelectMode == 4) //���ݒ胂�[�h�̏ꍇ�@
{
Min--;
if(Min <= -1)Min = 0;
}
else //�b�ݒ胂�[�h�̏ꍇ
{
Sec--;
Count_100msec = Count_100msec - 10;
Count_25msec = 0;
if(Sec <= -1)
{
Sec = 0;
Count_100msec =0;
}
}
WeekFunc();
}
if(swCount_Down >= 5)swCount_Down = 5; //�X�C�b�`��������Â���ꂽ�ꍇ��
}
#int_timer0 //�^�C�}�P������(25msec���Ɋ����ݔ����j
interval()
{
set_timer0(49911); // 0.05��sec �~�@4�@�~�@8�@�~�@15625�@���@10000��sec�@=�@25msec �iat �V�X�e���N���b�N20MH���j
// 256�~256�@-�@15625�@=�@49911
sw_check(); //�X�C�b�`���͂��`�F�b�N
Count_25msec++;
if(Count_25msec >= 4) //100msec��
{
Count_25msec = 0;
if(OutputMode == 1) time_output();
//�@�^�C���R�[�h�o�̓��[�h�ł����100msec��
//�@�t���\��
lcd_clear();
printf(lcd_data,"%ld.%ld.%ld %s ",Year,Month,Day,str); // �@
lcd_cmd(0xC0); //�@�Q�s�ڂ̐擪��
if(OutputMode == 1)sprintf(str_Mode," "); //�^�C���R�[�h�o�̓��[�h
else //�@�N���������b�̐ݒ胂�[�h
{
switch(SelectMode)
{
case 0: //����N�ݒ�
sprintf(str_Mode,"(Year)");
break;
case 1: //���ݒ�
sprintf(str_Mode,"(Month)");
break;
case 2: //���ݒ�
sprintf(str_Mode,"(Day)");
break;
case 3: //���ݒ�..
sprintf(str_Mode,"(H)");
break;
case 4: //���ݒ�
sprintf(str_Mode,"(Min)");
break;
case 5: //�b�ݒ�
sprintf(str_Mode,"(Sec)");
break;
default: break;
}
}
printf(lcd_data,"%ld:%ld:%ld %s",H,Min,Sec,str_Mode); //
}
return 0;
}
main(){
setup_timer_0(RTCC_INTERNAL |RTCC_DIV_8);
set_timer0(49911);
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"TimeCode Start");
WeekFunc();
delay_ms(1000);
output_low(PIN_E2);
enable_interrupts(INT_TIMER0);
enable_interrupts(GLOBAL);
while(1) //�@�����݂�҂�
{
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
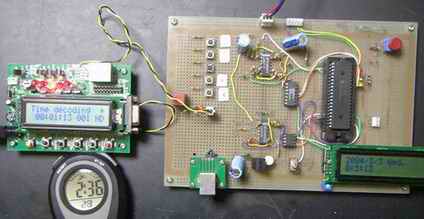
�����쌋�ʁ�
�i�P�j�@�^�C���R�[�h����
�@�@�d�g���v�@Ver.2 �L�b�g�i�������F�i�L�j�g���C�X�e�[�g�@�@�̔����F�H���d�q�ʏ��j�̃^�C���R�[�h��ǁE�\�����ڑ�����
�@���L�̓�����m�F���܂����B
�@�@
�@�@�d����������i��V�b�j
�d�g���vVer.2�L�b�g���}�[�N�iM�j�M�������o���悤�Ƃ��Ă����Ԃ̎ʐ^ |
|
�A�d�����������Q����@�}�[�N�M���iM�j���Q�o���āA�^�C���R�[�h�̉�͂��J�n��������̎ʐ^ |
|
�B�@�d�����������T����A�^�C���R�[�h����͂��āA�������h����@�f07�N11��3�� �y�j���@0��5��3�b�h��\����������̎ʐ^ |
 |
|
 |
|
 |
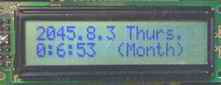
�i�Q�j�@�������鎞��(�N���������b�j�̐ݒ�
�@�@�@2045�N8��15����ݒ肵�����̎ʐ^�������܂�
�@�@�ݒ�͈ȉ��̑���ƂȂ�܂��B
�@�@�@�@�@�@�Z�b�g�{�^���������@�@�@�F�@�^�C���R�[�h�o�̓��[�h����ݒ胂�[�h�ɂȂ�B�ݒ胂�[�h���̓^�C���R�[�h�͏o�͂���Ȃ�
�@�@�@�@�A�@�Z���N�g�{�^���������@ �F�@�ݒ�ύX�Ώۂ��@
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�N�iYear�j�@���@���iMonth)�@���@���iDay)�@���@���iTime)�@�����iMin)�@���b�iSec)�@
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ���N�iYear) �����iMonth)�@�c�c�@���J��Ԃ�
�@�@�@�@�B�@�A�b�v�{�^���܂��̓_�E���{�^���������ā@�ݒ萔�l���P�Â������ĕύX����B
�@�@�@�@�C�@�Z�b�g�{�^���������@�@�@�F�@�ݒ胂�[�h����^�C���R�[�h�o�̓��[�h�ɕς��B
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@
�@�@
�@�d�g���v
���@���������i�^�C���R�[�h�j���
�@�@�@�@�@PIC�Ń^�C���R�[�h����ǂ�������Љ�܂��B���A�^�C���R�[�h���M����PIC�S�T�T�O�̃v���O�����͏�L�̃v���O����
�@�@�@�@�œ��삵�Ă��܂��B
�@
������i�d�l��
�@�@�@�@�E�@JJY�Ɠ��d�l�̃^�C���R�[�h����ǂ��@�b���������N�j�����t���ɕ\������B
�@�@�@�@�E�@��M���Ă���M���̃p���X���y�шӖ��i�@�f0�f�A�f1�f�A�}�[�J�[�M���A�|�W�V�����}�[�J�[�M���j���t���ɕ\������B
�@�@�@�@�E�@���߁i�O�`15�b�O�j�̎�M�p���X���t���ɕ\������B
�@�@�@�@�E�@��ǂ̏����͈ȉ��Ƃ���B
�@�@�@�@�@�@�@�@�@�@�R�̘A���}�[�J�M�����o
�@�@�@�@�@�@�@�@�A�@����180�b�̐M���Ɂ@�f0�f�A�f1�f�A�}�[�J�[�M���A�|�W�V�����}�[�J�[�M���ȊO�̐M�����Ȃ�����
�@�@�@�@�@�@�@�@�B�@����180�b�̐M���ɂ����ĂR�t���[���̕��y�ю��̃p���e�B�`�F�b�N�����邱��
�@�@�@�@�@�@�@�@�C�@0�`60�b�O�A60�`120�b�O�A120�`180�b�O�̊e�t���[�����̕����P�b�ÂÂ�Ă��邱��
�B
�@�@
�@�@�@������i��H�}���i����H�}��PDF�t�@�C���j
�@�@�@dsPIC30F2012���g��������Љ�܂��B
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂��B
�@���v���O�����၄ ��dsPIC�@C30�ҁ�
///************************************************************/
//*�@�d�g���v
//* �@�@�@JJY�@���������i�^�C���R�[�h�j���
//* �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@dsPIC30F2012
//************************************************************/
// MPLAB�@�v���W�F�N�g�ւ̒lj��t�@�C��
// Linker Script�t�H���_�@ p30f2012.gld
// Library Files�t�H���_�@ lib30F2012-coff.a
#include "p30f2012.h"
#include <stdio.h>
#include <InCap.h>
#include <timer.h>
#include "1lcd_lib_C30.h"
int Ver = 1;
char Buf1[21];
char Decode_Mode = 0;
//������̃o�b�t�@�[�p���W�X�^
unsigned int FirstEdge_Rise,SecondEdge_Rise,FirstEdge_Fall,dumy,
TimeCount_10msec = 0,TimeCount_sec = 0,
n_TimeCode =0,i_TimeCode=0;
float T0,T1;
int Sec,Min,H,Week,Day,Month,Year,Day_This_Year;
char data[180];
char Check[12];
char NewPulse = 0x00;
char* str;
char Sun[] = "Sun";
char Mon[] = "Mon";
char Thu[] = "Thu";
char Wed[] = "Wed";
char Thr[] = "Thr";
char Fri[] = "Fri";
char Sat[] = "Sat";
void delay_ms(unsigned int);
void LCD();
void Month_DayFunc();
void MonthFunc();
void _ISR _IC1Interrupt(void);
void _ISR _IC2Interrupt(void);
void _ISR _T1Interrupt(void);
void decode();
void Receive();
_FOSC(CSW_FSCM_OFF & // �N���b�N��ւ��Ȃ��A�t�F�[�X�Z�C�t�N���b�N���j�^�Ȃ�
XT_PLL4 //�O�����U�q�F10MHz�APLL�F4�{�@���@�V�X�e���N���b�N���g����10�~4��40MHz //4,8,16�{���I����
);
_FWDT(WDT_OFF);
_FBORPOR(PBOR_ON & //�u���E���A�E�g���Z�b�g�@�\�FON
BORV_42 & //�u���E���A�E�g�d���F4.2V
PWRT_64 & //�p���[�I�����Z�b�g�^�C�}64msec
MCLR_EN //MCLR�@�\�FON
);
_FGS(CODE_PROT_OFF); //�R�[�h�v���e�N�g�FOFF
void delay_ms(unsigned int N) //�E�F�C�g��
{
__delay32(Clock/4000*N);
}
void Month_DayFunc() //�P���P������̗v�������猎�Ɠ������߂��
{
int Day_Feb;
if((Year % 4 == 0) && ((Year % 100) != 0) )Day_Feb = 29;//���邤�N�̏ꍇ
else Day_Feb = 28;
if(Day_This_Year <= 31) //�P��
{
Month = 1;
Day = Day_This_Year;
}
else if(Day_This_Year <= (31 + Day_Feb))//�Q��
{
Month = 2;
Day = Day_This_Year -31;
}
else if(Day_This_Year <= (62+Day_Feb)) //�R��
{
Month = 3;
Day = Day_This_Year -(31+Day_Feb);
}
else if(Day_This_Year <= (92+Day_Feb)) //�S��
{
Month = 4;
Day = Day_This_Year -(62+Day_Feb);
}
else if(Day_This_Year <= (123+Day_Feb)) //�T��
{
Month = 5;
Day = Day_This_Year -(92+Day_Feb);
}
else if(Day_This_Year <= (153+Day_Feb)) //�U��
{
Month =6;
Day = Day_This_Year -(123+Day_Feb);
}
else if(Day_This_Year <= (184+Day_Feb)) //�V��
{
Month =7;
Day = Day_This_Year -(153+Day_Feb);
}
else if(Day_This_Year <= (215+Day_Feb)) //�W��
{
Month =8;
Day = Day_This_Year -(184+Day_Feb);
}
else if(Day_This_Year <= (245+Day_Feb)) //�X��
{
Month =9;
Day = Day_This_Year -(215+Day_Feb);
}
else if(Day_This_Year <= (276+Day_Feb)) //�P�O��
{
Month =10;
Day = Day_This_Year -(245+Day_Feb);
}
else if(Day_This_Year <= (306+Day_Feb)) //�P�P��
{
Month =11;
Day = Day_This_Year -(276+Day_Feb);
}
else //�P�Q��
{
Month = 12;
Day = Day_This_Year -(306+Day_Feb);
}
}
void MonthFunc() //�@��������������iDay���{�P�������j�̌��iMonth�j�����߂��
{
if(Month == 2) //2���̏ꍇ
{
if((Year % 4 == 0) && ((Year % 100) != 0)) //���邤�N�̏ꍇ
{
if(Day >= 30)
{
Day = 1;
Month++;
}
}
else //���邤�N�łȂ��ꍇ
{
if(Day >= 29)
{
Day = 1;
Month++;
}
}
}
else if(Month == 12) //12���̏ꍇ
{
if(Day >= 32)
{
Day = 1;
Month = 1;
Year++;
}
}
else if( (Month == 4) || (Month == 6) || //4�A6�A9�A11���̏ꍇ
(Month == 9) || (Month == 11) )
{
if(Day >= 31)
{
Day = 1;
Month++;
}
}
else //2�A4�A6�A9�A11�A12���ȊO�̌�
{
if(Day >= 32)
{
Day = 1;
Month++;
}
}
}
void decode() //�^�C���R�[�h���
{
int i,x_Check,Sum,Min0,Min1,Min2;
//��NJJ�n����
//�i�P�j�@��M�f�[�^�̃t���[���ԍ����ォ���M�������ԂɃt���[��0�A�t���[��1�A�t���[��2�Ƃ���
//�@�@�@�@�t���[��0,1,2�̃}�[�J�M���R����M�������Ƃ��m�F
if((data[0] == 'M') && (data[60] == 'M') && (data[120] == 'M'))Check[0] = 0x00;
else Check[0] = 0x01;
//�i�Q�j�@�t���[��0�A1,2�̃f�[�^�����ׂėL���ł��邩�`�F�b�N
x_Check = 0x00;
for(i = 0; i < 180; i++)
{
if(data[i] == 'x')x_Check++;
}
if(x_Check == 0x00)Check[1] = 0x00;
else Check[1] = 0x01;
//�i�R�j�@�t���[��0,1,2�́h���h �Ɓ@�h���h�̃p���e�B�i�����j�`�F�b�N�@�@�idata[i]�̑�0�r�b�g�ȊO�͂O�j
for(i = 0; i < 3; i++)
{
if(data[60-1+60*i]^data[60-2+60*i]^data[60-3+60*i]^
data[60-5+60*i]^data[60-6+60*i]^data[60-7+60*i]^data[60-8+60*i]
== data[60-37+60*i])
Check[3+i] = 0x00;
else Check[3+i] = 0x01;
if(data[60-12+60*i]^data[60-13+60*i]^
data[60-15+60*i]^data[60-16+60*i]^data[60-17+60*i]^data[60-18+60*i]
== data[60-36+60*i])
Check[6+i] = 0x00;
else Check[6+i] = 0x01;
}
//�i�S�j�@�t���[��0�ƃt���[��1�Ƃ́h���h�̍����P���ł��邱�Ɓ@
//�@�@�@�y�с@�t���[��0�ƃt���[��2�Ƃ�"���h�̍���2���ł��邱�Ƃ̃`�F�b�N
Min0 =((int)((data[60-1] << 2) + (data[60-2] << 1) + data[60-3]))*10
+ (int)((data[60-5] << 3) + (data[60-6] << 2) + (data[60-7] << 1) + data[60-8]) +1;
Min1 =((int)((data[120-1] << 2) + (data[120-2] << 1) + data[120-3]))*10
+ (int)((data[120-5] << 3) + (data[120-6] << 2) + (data[120-7] << 1) + data[120-8]) +1;
Min2 =((int)((data[180-1] << 2) + (data[180-2] << 1) + data[180-3]))*10
+ (int)((data[180-5] << 3) + (data[180-6] << 2) + (data[180-7] << 1) + data[180-8]) +1;
if( (((Min0 - Min1) == 1) || ((Min0 - Min1) == -59) ) &&
(((Min0 - Min2) == 2) || ((Min0 - Min2) == -58)) )Check[9] = 0x00;
else Check[9] = 0x01;
Sum = 0x00;
for(i = 0; i < 10; i++)Sum = Sum + Check[i];
if(Sum == 0x00) //�i�P�j~�i�S�j�̏��������ׂĖ������ꂽ�ꍇ�ɉ�NJJ�n
{
Decode_Mode = 1;
Sec = 0; //�����i�����O�b�j�@���@�}�[�N�M�������o�����̂�
//�������
Min =((int)((data[60-1] << 2) + (data[60-2] << 1) + data[60-3]))*10
+ (int)((data[60-5] << 3) + (data[60-6] << 2) + (data[60-7] << 1) + data[60-8]) +1;
//�������
H = ((int)((data[60-12] << 1) + data[60-13]))*10
+ (int)((data[60-15] << 3) + (data[60-16] << 2) + (data[60-17] << 1) + data[60-18]);
//�P���P������̗v���������
Day_This_Year = ((int)((data[60-22] << 1) + data[60-23] ))*100
+ ((int)((data[60-25] << 3) + (data[60-26] << 2) + (data[60-27] << 1) + data[60-28]))*10
+ (int)((data[60-30] << 3) + (data[60-31] << 2) + (data[60-32] << 1) + data[60-33]);
//����Q�������
Year = ((int)((data[60-41] << 3) + (data[60-42] << 2) + (data[60-43] << 1) + data[60-44]))*10
+ (int)((data[60-45] << 3) + (data[60-46] << 2) + (data[60-47] << 1) + data[60-48]);
//�N�Ɨv��������@���ƌ����v�Z
Month_DayFunc(); //���@Day, Month���v�Z
//���j���������
Week = (int)((data[60-50] << 2) + (data[60-51] << 1) + data[60-52]);
}
}
void Receive() //�f�[�^��M�� : ��M�p���X��
{
int i;
char temp;
if((T1 > 150000) && (T1 < 250000))
{
temp = 'P'; //�p���X��200msec�@���@�}�[�J�iM�j�܂��̓|�W�V�����}�[�J�iP0-P5�j���o�̏ꍇ
if(data[0] == 'P')temp = 'M'; //��200msec�̃p���X���A�����Ă����ꍇ�� data[0]���}�[�N�M���iM)�Ɣ��f
}
else if((T1 >450000) && (T1 < 550000))temp = 0x01; //�_���h�P�h���o�̏ꍇ
else if((T1 > 750000) && (T1 < 850000))temp = 0x00; //�_���h�O�h���o�̏ꍇ
else temp = 'x'; //�p���X����200msec�A500msec�A8000msec�̂�����ł��Ȃ��ꍇ
for(i = 179; i > 0; i--)data[i] = data[i-1]; //��ԌÂ���M�f�[�^��j�����A��M�f�[�^�i�[�z��ԍ����J��グ��
data[0] = temp;
decode();
NewPulse = 0x00;
}
void _ISR _IC1Interrupt(void) //�����オ��G�b�W���Ɋ����ݔ��� �@�@�������o
{
ReadCapture1(&FirstEdge_Rise);
T0 = (float)(FirstEdge_Rise)*25.6; // �p���X�̎���
// �J�E���g�N���b�N�̎����i1/Fosc�~4) ��T = 1/40MHz �~4�~256�i�v���X�P�[���j�@=25.6��sec�@
//Fosc��80MH���̏ꍇ
//�@�@�@�@�J�E���g�N���b�N�̎����i1/Fosc�~4) ��T = 1/80MHz �~4�~256�i�v���X�P�[���j�@=12.8��sec
//�@�@�@�@�L���v�`���i16�r�b�g�j�ŃJ�E���g�ł���ő厞�� = 12.8��sec�~65536 = 838860.8��sec
// �@�@�@=838.8608msec�@<�@1000msec�i�^�C���R�[�h�̎����j�@���@80MH����NG
do
{
ReadCapture1(&dumy); //FIFO�o�b�t�@�N���A�@���@FIFO�o�b�t�@����iIC2CONbits.ICBNE=0�j��
}while(IC2CONbits.ICBNE); //�Ȃ�Ȃ��Ǝ��̊��荞�݂͂�����Ȃ�
TMR2 = 0; //�^�C�}�Q�̃J�E���g�l���Z�b�g��0
IFS0bits.IC1IF = 0; //�t���O�N���A
}
void _ISR _IC2Interrupt(void) //����������G�b�W���Ɋ����ݔ����@�@�p���X�����o
{
ReadCapture2(&FirstEdge_Fall);
T1 = (float)FirstEdge_Fall*25.6; //�p���X��High�i�P�j�̎���
NewPulse = 0x01;
do
{
ReadCapture2(&dumy); //FIFO�o�b�t�@�N���A�@���@FIFO�o�b�t�@����iIC2CONbits.ICBNE=0�j��
}while(IC2CONbits.ICBNE); //�Ȃ�Ȃ��Ǝ��̊��荞�݂͂�����Ȃ�
IFS0bits.IC2IF = 0; //�t���O�N���A
}
void _ISR _T1Interrupt(void) //10msec���̊����ݔ���
{
IFS0bits.T1IF = 0; //IFS0���W�X�^�́@T1IF(�^�C�}�P�̊������o�j�t���O���Z�b�g
TimeCount_10msec++; //10msec���ɃC���N�������g
if(TimeCount_10msec >= 100)
{
Sec++;
TimeCount_10msec = 0;
if(Sec >= 60)
{
Sec = 0;
Min++;
if(Min >= 60)
{
Min = 0;
H++;
if(H >= 24)
{
H = 0;
Day++;
Week++;
if(Week >= 7)Week =0;
MonthFunc();
}
}
}
}
}
void LCD() //�t���\��
{
unsigned int T0x,T1x;
char temp0,temp1;
char pulse;
char te[8];
char data_t[16];
int i;
lcd_clear();
T0x = (unsigned int)(T0/1000);
T1x = (unsigned int)(T1/1000);
for(i = 0; i <16; i++)
{
if(data[i] == 0x00)data_t[i] = 0x30;
else if(data[i] == 0x01)data_t[i] = 0x31;
else data_t[i] = data[i];
}
switch(Decode_Mode)
{
case 0: //�}�[�J�M�����o������M�f�[�^���W��
sprintf(Buf1,"T1=%umsec '%c'",T1x,data_t[0]); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_str(Buf1);
lcd_cmd(0xC0);
sprintf(Buf1,"%c%c%c%c%c%c%c%c%c%c%c%c%c%c%c%c",
data_t[0],data_t[1],data_t[2],data_t[3],data_t[4],data_t[5],data_t[6],data_t[7],//������Ƃ��ăo�b�t�@�[�Ɏ��[
data_t[8],data_t[9],data_t[10],data_t[11],data_t[12],data_t[13],data_t[14],data_t[15]);//������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_str(Buf1);
delay_ms(100);
break;
case 1: //�@�^�C���R�[�h��nj� //07/11/03 Sat 'M'
//15:23:12 200msec
switch(Week)
{
case 0: str = Sun; break; //���j��
case 1: str = Mon; break; //���j��
case 2: str = Thu; break; //�Ηj��
case 3: str = Wed; break; //���j��
case 4: str = Thr; break; //�ؗj��
case 5: str = Fri; break; //���j��
case 6: str = Sat; break; //�y�j��
default: break;
}
sprintf(Buf1,"'%d/%d/%d %s '%c'",Year,Month,Day,str,data_t[0]);
lcd_str(Buf1);
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf1,"%d:%d:%d %umsec ",H,Min,Sec,T1x); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_str(Buf1);
delay_ms(100);
break;
default:
break;
}
}
int main(void) //���C����
{
TRISB = 0;
TRISF = 0b1111111111001111;
TRISD = 0xFFFF;
OpenTimer1(T1_ON & //�^�C�}�PON
T1_GATE_OFF & //�Q�[�g����ON
T1_PS_1_8 & //�v���X�P�[���@1/8
T1_SYNC_EXT_OFF & //�N���b�N��������OFF
T1_SOURCE_INT , //�N���b�N���F�����N���b�N
12499 //10msec���Ɋ����� �� 10msec �~ 1000 �~ �i40MHz/4MHz) / 8 = 12500
//PR1 = 12499 ( =12500 - 1)
); //
OpenTimer2(T2_ON & T2_GATE_OFF & T2_PS_1_256 & T2_SOURCE_INT, 65000-1);
//���샂�[�h�ݒ背�W�X�^ IC2CON�̐ݒ�
OpenCapture1(IC_IDLE_STOP & //Idle����~
IC_TIMER2_SRC & //�^�C�}2�ő���
IC_INT_1CAPTURE & //�L���v�`���[���Ɋ����ݔ���
IC_EVERY_RISE_EDGE //�����オ��G�b�W���ɃL���v�`���[
);
OpenCapture2(IC_IDLE_STOP & //Idle����~
IC_TIMER2_SRC & //�^�C�}2�ő���
IC_INT_1CAPTURE & //�L���v�`���[���Ɋ����ݔ���
IC_EVERY_FALL_EDGE //����������G�b�W���ɃL���v�`���[
);
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf1,"Cap %d",Ver); //arguement���Ȃ��ƒx�� C30�̃o�O�H
lcd_str(Buf1); //�t���\��
delay_ms(1000);
ConfigIntTimer1(T1_INT_PRIOR_5 & T1_INT_ON); //�����݃��x���T�@�^�C�}�P������ON
ConfigIntCapture1(IC_INT_PRIOR_4 & IC_INT_ON); //IPC1bits.IC1IP = 4;
ConfigIntCapture2(IC_INT_PRIOR_3 & IC_INT_ON); //IPC1bits.IC2IP = 3;
EnableIntT1; //��������
EnableIntIC1; //�������@IEC0bits.IC1IE = 1;�@
EnableIntIC2; //�������@IEC0bits.IC2IE = 1;�@
while(1) //�����݂�҂�
{
LCD();
if(NewPulse ==0x01)Receive();
}
return 0;
}
//********************************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή� �y�ѕ��U�|�[�g�Ή����ŕύX�������̂ł��B
//********************************************************************************************
#include "p30f2012.h"
#define Clock 40000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATBbits.LATB7 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATBbits.LATB6 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATBbits.LATB5 //LCD��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATBbits.LATB4 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATFbits.LATF4 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATFbits.LATF5 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//********************************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή��A�y�ѕ��U�|�[�g�Ή����ŕύX�����������̂ł��B
//********************************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C30�R���p�C���[
// �������͈ȉ�
//�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C30.h"
unsigned int _1usec; // 1��sec�҂ɕK�v�ȃE�F�C�g��
unsigned int _50usec; //50��sec�҂ɕK�v�ȃE�F�C�g��
unsigned long N_msec; // 1msec�҂ɕK�v�ȃE�F�C�g��
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
__delay32(_1usec); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
__delay32(_1usec); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
__delay32(2*N_msec); // 2msec�҂�
else
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
// __delay32(15*N_msec); //15msec�E�F�C�g
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
_1usec =(unsigned int)( Clock / 4000000); // 1��sec�ɗv����E�F�C�g��
//__delay32(N) �F N��11�ȉ��̏ꍇ�ł�11��E�F�C�g
_50usec = (unsigned int)(Clock / 4000000 * 50); //50��esc�ɗv����E�F�C�g��
N_msec = (unsigned long int)(Clock / 4000); // 1msec�ɗv����E�F�C�g��
// = Clock / 4000000*1000
__delay32(20*N_msec); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(5*N_msec); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
�@�����쌋�ʁ�
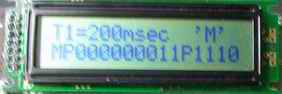
�@�P�DJJY�d�l�̃^�C���R�[�h����ǒ��Ɖ�ǒ���̎ʐ^�����L�Ɏ����܂��B
�@�@�@���^�C���R�[�h��ǒ���
�@�@�@�@�E�t���̂P�s�ڂ́@�hT1=800msec�@ 0 �h�@�́@�p���X��800msec�i�����F1sec�j�̃p���X����M���A�p���X�̈Ӗ���
�@�@�@�@�@�_���f0�f�i�[���j�ł���@�Ɖ]�����Ƃ�����킵�Ă��܂��B
�@�@�@�@�E�t���̂Q�s�ڂ́@�h000P00000100MP00�h �́@0�`15�b�O�Ɏ�M�����p���X�̈Ӗ�������킵�Ă��܂��B
�@�@�@�@�@�@�@�@�ŏ�ʁi���[�j0�@�F�@���߂̎�M�M�����f0�f�ł��������Ƃ������Ă��܂�
�@�@�@�@�@�@�A�@���[����2,3�Ԗڂ�0�@�F�@�P�b�O�A�Q�b�O�̐M����0�ł��������Ƃ������Ă��܂�
�@�@�@�@�@�@�B�@���[����4�Ԗڂ�P�@�@�F�@�R�b�O�Ƀ|�W�V�����}�[�J�[�i��200msec�j����M�������Ƃ������Ă��܂�
�@�@�@�@�@�@�C�@���[����5�`9�Ԗڂ̂O�F�@�S�`�W�b�O�̎�M�M����0�ł��������Ƃ������Ă��܂�
�@�@�@�@�@�@�D�@���[����10�Ԗڂ̂P�@�F�@�X�b�O�̎�M�M����1�ł��������Ƃ������Ă��܂��B
�@�@�@�@�@�@�E�@���[����13�Ԗڂ�M�@�F�@�P�Q�b�O�̎�M�M�����}�[�J�[�ł��������Ƃ������Ă��܂�
�@�@�@�@�@�@�F�@���[����14�Ԗڂ�P�@�F�@�P�R�b�O�̎�M�M�����|�W�V�����}�[�J�ł��������Ƃ������Ă��܂��B
�@�@�@���^�C���R�[�h��NJ�����
�@�@�@�@�E�t���̂P�s�ڂ́@�h �f�V/11/3�@Sat�@�@�f0�f�@�h�@�́@����i���j�V�N11���R���@�y�j���@����M�������Ƃ������܂��B
�@�@�@�@�@�f0�f�́@�_���f0�f����M��������ł��邱�Ƃ������Ă��܂��B
�@�@�@�@�E0�F13�F14�@�@800msec�@�͎�M�����������@�ߑO0��13��14�b�ł��邱�Ƃ������Ă��܂��B�@800msec�́@�p���X
�@�@�@�@�@��800msec�̃p���X����M��������ł��邱�Ƃ������Ă��܂��B�@800msec��JJY�^�C���R�[�h�ł͘_���f0�f�ƋK��
�@�@�@�@�@����Ă��܂��B�B�@
�@�^�C���R�[�h��ǒ�
�i��M�J�n�@18�b��j |
|
�^�C���R�[�h��NJ���
�i��M�J�n�@�R���P�X�b��j |
 |
|
 |
�����̉t�����^�C���R�[�h���M���̉t���ŁA
�E�㑤�̉t������M���̉t���ł�
|
�Q�D�@��M�p���X
�@�@�@�@�^�C���R�[�h��ǒ��Ɋe�p���X����M�������̎ʐ^���ȉ��Ɏ����܂��B
�|�W�V�����}�[�J�[
�i�p���X��200msec�j |
|
 |
�}�[�J�[
�i�p���X��200msec�j
�i���j |
|
 |
�_���f�P�f
�i�p���X��500msec�j |
|
 |
�_���f�O�f
�i�p���X��800msec�j |
|
 |
�@�@�@�@�@�@�@�i���j�p���X��200msec�̃p���X���Q�A�����Ď�M�����ꍇ�A��̃p���X���}�[�J�[�M���Ɣ��ǂ��Ă��܂��B
���@���d�ް�ɂ��h���~�t�@�\���V�h���@��XC32�@PIC32MX795F512L��
�@���d�l��
�@�@�E���d�ް�i���d�T�E���_�[�j�Ł@�h���~�t�@�\���V�h�@�h�V���\�t�@�~���h�̉����@PIC32MX�Ŕ�����B
�@�@�@�@�e���K�̎��g���͉��L�Ƃ���
| ���K |
���g���iHz) |
| �h |
261.63 |
| �� |
293.67 |
| �~ |
329.63 |
| �t�@ |
349.23 |
| �\ |
392.00 |
| �� |
440.00 |
| �V |
493.88 |
| �h |
523.23 |
�@�@�E�ް���ʂ͉ςł��邱�ƁB�@
�@�@�E�\�t�g��OC�iOutput Compare)��PWM���W���[�����g�����ƁB
�@�@�E���d�ް�́A���c���쏊�@PKM13EPYH4000-A0 (�H���d�q�̔����i�j�Ƃ���B
������i��H�}���i����H�}��PDF�t�@�C���j
�@�@PIC32MX795F512L���g��������Љ�܂��B
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@�@�@�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
#include <p32xxxx.h>
#include <plib.h>
// �R���t�B�M�����[�V�����ݒ�
// CPU=80MHz Peri=80MHz,HS+PLL,Divider=1/2,PLL=x20,WDT=Off
#pragma config FNOSC=PRIPLL, POSCMOD=HS, FPLLIDIV=DIV_2
#pragma config FPLLMUL=MUL_20, FPBDIV=DIV_1, FPLLODIV=DIV_1
#pragma config FWDTEN=OFF, ICESEL=ICS_PGx2
int Clock = 80000000; //80MHz
void delay_us(unsigned int usec) //1��sec�x����
{
int count;
count = (int)(Clock/20000000)*usec;
do //�����F�@at�@Clock=80000000
{ //delay_us(1000)��1003��sec�A�@delay_us(100)��102��sec�Adelay_us(10)��11��sec�Adelay_us(1)��1.6��sec
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void delay_ms(unsigned int msec) //1msec�x����
{
unsigned int i;
for(i=0; i<msec; i++)
delay_us(1000);
}
void BuzFreq(int Freq,float Duty)
{
int PR; //PWM�����̃��W�X�^�l( = PR2)
float PS_T2 = 16; //�^�C�}2�̃v���X�P�[���l
PR = (int)(80000000/Freq/PS_T2); //80000000: �V�X�e���N���b�N�i PICMX32��1�N���b�N��1���߁j
//��F�@���d�ް���g���@1000Hz�A�v���X�P�[���l�F16 �̏ꍇ
//�@PR = 80000000/1000/16 = 5000
OpenTimer2( T2_ON | // �^�C�}�P�@�C�l�[�u���@ //T1_OFF�@�� �^�C�}1�@�f�B�Z�[�u��
T2_SOURCE_INT | //�N���b�N�\�[�X�F�C���^�[�i���@//T1_SOURCE_EXT�@���@�O�����U��
T2_PS_1_16, //�v���X�P�[���@1/16�@�@�@//1/1�A1/2�A1/4�A1/8�A1/16�A1/32�A1/64�A1/256
PR //(��j�@PR = 10000 �F�@T0[sec] = 1/80000000*16*10000�@=0.002sec = 2msec //500Hz
//PICMX32��1�N���b�N��1����
//���� T0�msec�n�@=�@1/Fosc /�v���X�P�[���@�~ PR
);
OpenOC4( OC_ON | OC_TIMER_MODE16 | OC_TIMER2_SRC | OC_PWM_FAULT_PIN_DISABLE,0,0); //SRC: source
//OCx�̉\�ݒ�^�C�}
// OC1 : Timer4 Timer5
// OC2 : Timer4 Timer5
// OC3 : Timer4 Timer5
// OC4 : Timer2 Timer3
// OC5 : Timer2 Timer3
SetDCOC4PWM((int)PR*Duty); //OCxRS�i���@DC1�j�ւ̏�����
}
void Do1(void){
BuzFreq(261.63,0.5);//�h //261.63Hz
}
void Re1(void)
{
BuzFreq(293.67,0.5); //���@//293.67Hz
}
void Mi1(void)
{
BuzFreq(329.63,0.5); //�~�@//329.63Hz
}
void Fa1(void)
{
BuzFreq(349.23,0.5); //�t�@ //349.23Hz
}
void So1(void)
{
BuzFreq(392,0.5); //�\ //392Hz
}
void Ra1(void)
{
BuzFreq(440.00,0.7); //�� //440.00Hz
}
void Si1(void)
{
BuzFreq(493.88,0.4); //�V //493.88Hz
}
void Do2(void)
{
BuzFreq(523.23,0.5); //�h //523.23Hz
}
int main(void)
{
int T0 = 300;
SYSTEMConfigPerformance(Clock); // �V�X�e���œK��
DDPCONbits.JTAGEN = 0; //I/O�|�[�g�Ƃ���RA0�ARA1�ARA4�ARA5�������ꍇ�A�d��������DDPCON���W�X�^��bit3��0�ɁA�ݒ肷��K�v������G�܂��B
TRISDbits.TRISD3 = 0; //RD3: out
while(1)
{
Do1(); //�h
delay_ms(T0);
CloseTimer2();
Re1(); //��
delay_ms(T0);
CloseTimer2();
Mi1(); //�~
delay_ms(T0);
CloseTimer2();
Fa1(); //�t�@
delay_ms(T0);
CloseTimer2();
So1(); //�\
delay_ms(T0);
CloseTimer2();
Ra1(); //��
delay_ms(T0);
CloseTimer2();
Si1(); //�V
delay_ms(T0);
CloseTimer2();
Do2(); //�h
delay_ms(T0);
CloseTimer2();
delay_ms(2000);
Do2(); //�h
delay_ms(T0); //
CloseTimer2();
Si1(); //�V
delay_ms(T0); //
CloseTimer2();
Ra1(); //��
delay_ms(T0); //
CloseTimer2();
So1(); //�\
delay_ms(T0); //
CloseTimer2();
Fa1(); //�t�@
delay_ms(T0); //
CloseTimer2();
Mi1(); //�~
delay_ms(T0); //
CloseTimer2();
Re1(); //��
delay_ms(T0); //
CloseTimer2();
Do1(); //�h
delay_ms(T0); //
CloseTimer2();
delay_ms(2000);
}
return 0;
}
�@
�����쌋�ʁ�
�@���d�ް���@���������@�h���~�t�@�\���V�h�@�h�V���\�t�@�~���h�@���@�^�������t�@�C���iSounder_DoReMi.aac�j�ł��B�@PC�ōĐ����ĕ����Ă��������B�B�@
�@�@
�@
���@���d�X�s�[�J�ɂ��@���́u�ӂ邳�Ɓv��PIC32MX795F512L��
���d�l��
�@�EPIC32MX795F512L�̃R���y�A���W���[����PWM����ɂ��A�@���L�̃P�C�^�C�Ȃǂł����Ă��鈳�d�X�s�[�J�������ď��̂����t����B
�@�@���c���쏊�@�@�@Piezoelectric Speaker�@�@�@VSLBP2115E1100-T1
�@�@�@�@�@�@�@�@�@�@�@�@Rated Frequency Range 200Hz to 20kHz
�@�@�@�@�@�@�@�@�@�@�@�@Sound Pressure Level 93.5dB�}3.0dB
�@�E���t����@���̂́u�ӂ邳�Ɓv�Ƃ��A���L�y���̒��i�w�����j�A�e���|�i80�j�A�����@�y�ыx�~������
�@�@���������ā@���d�X�s�[�J�̐����g���A�����ԁ@�y�ыx�~���ԓ��������t�̂��ƁB
������i��H�}���i����H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@�@�@�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
#include <p32xxxx.h>
#include <plib.h>
// �R���t�B�M�����[�V�����ݒ�
// CPU=80MHz Peri=80MHz,HS+PLL,Divider=1/2,PLL=x20,WDT=Off
#pragma config FNOSC=PRIPLL, POSCMOD=HS, FPLLIDIV=DIV_2
#pragma config FPLLMUL=MUL_20, FPBDIV=DIV_1, FPLLODIV=DIV_1
#pragma config FWDTEN=OFF, ICESEL=ICS_PGx2
int Clock = 80000000; //80MHz
int T4; //�l�������̎���[msec]
int tempo_speed = 80; //�e���|��80�@
void delay_us(unsigned int usec) //1��sec�x����
{
int count;
count = (int)(Clock/20000000)*usec;
do //�����F�@at�@Clock=80000000
{ //delay_us(1000)��1003��sec�A�@delay_us(100)��102��sec�Adelay_us(10)��11��sec�Adelay_us(1)��1.6��sec
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void delay_ms(unsigned int msec) //1msec�x����
{
unsigned int i;
for(i=0; i<msec; i++)
delay_us(1000);
}
void BuzFreq(int Freq,float Duty)
{
int PR; //PWM�����̃��W�X�^�l( = PR2)
float PS_T2 = 16; //�^�C�}2�̃v���X�P�[���l
PR = (int)(80000000/Freq/PS_T2); //80000000: �V�X�e���N���b�N�i PICMX32��1�N���b�N��1���߁j
//��F�@���d�ް���g���@1000Hz�A�v���X�P�[���l�F16 �̏ꍇ
//�@PR = 80000000/1000/16 = 5000
OpenTimer2( T2_ON | // �^�C�}�P�@�C�l�[�u���@ //T1_OFF�@�� �^�C�}1�@�f�B�Z�[�u��
T2_SOURCE_INT | //�N���b�N�\�[�X�F�C���^�[�i���@//T1_SOURCE_EXT�@���@�O�����U��
T2_PS_1_16, //�v���X�P�[���@1/16�@�@�@//1/1�A1/2�A1/4�A1/8�A1/16�A1/32�A1/64�A1/256
PR //(��j�@PR = 10000 �F�@T0[sec] = 1/80000000*16*10000�@=0.002sec = 2msec //500Hz
//PICMX32��1�N���b�N��1����
//���� T0�msec�n�@=�@1/Fosc /�v���X�P�[���@�~ PR
);
OpenOC4( OC_ON | OC_TIMER_MODE16 | OC_TIMER2_SRC | OC_PWM_FAULT_PIN_DISABLE,0,0); //SRC: source
//OCx�̉\�ݒ�^�C�}
// OC1 : Timer4 Timer5
// OC2 : Timer4 Timer5
// OC3 : Timer4 Timer5
// OC4 : Timer2 Timer3
// OC5 : Timer2 Timer3
SetDCOC4PWM((int)PR*Duty); //OCxRS�i���@DC1�j�ւ̏�����
}
void Do_C4(void) //��l�I�N�^�[�u�@�h //C4
{
BuzFreq(261.63,0.5);//�h //261.63Hz
}
void Re_D4(void) //��l�I�N�^�[�u�@���@�@//D4
{
BuzFreq(293.67,0.5); //���@//293.67Hz
}
void Mi_E4(void) //��l�I�N�^�[�u�@�~ //E4
{
BuzFreq(329.63,0.5); //�~�@//329.63Hz
}
void Fa_F4(void) //��l�I�N�^�[�u�@�t�@ //F4
{
BuzFreq(349.23,0.5); //�t�@ //349.23Hz
}
void So_G4(void) //��l�I�N�^�[�u�@�\ //G4
{
BuzFreq(392,0.5); //�\ //392Hz
}
void La_A4(void) //��l�I�N�^�[�u�@�� //A4
{
BuzFreq(440.00,0.7); //�� //440.00Hz
}
void La_sharpA4(void) //��l�I�N�^�[�u #���i�d�C�j�@//A#4
{
BuzFreq(466.16,0.7); //�� //466.16Hz
}
void Si_B4(void) //��l�I�N�^�[�u�@�V //B4
{
BuzFreq(493.88,0.4); //�V //493.88Hz
}
void Do_C5(void) //��܃I�N�^�[�u�@�h //C5
{
BuzFreq(523.23,0.5); //�h //523.23Hz
}
void Re_D5(void) //��܃I�N�^�[�u�@��
{
BuzFreq(587.34,0.5); //�� //587.34Hz
}
void noSound(void)
{
CloseTimer2();
delay_ms(50);
}
int main(void)
{
int T0 = 300;
SYSTEMConfigPerformance(Clock); // �V�X�e���œK��
DDPCONbits.JTAGEN = 0; //I/O�|�[�g�Ƃ���RA0�ARA1�ARA4�ARA5�������ꍇ�A�d��������DDPCON���W�X�^��bit3��0�ɁA�ݒ肷��K�v������G�܂��B
TRISDbits.TRISD3 = 0; //RD3: out
T4 = 60 * 1000 / 80; //�l�������̎��ԁi�����j T4 = 750 [msec]
while(1)
{
// �֒���
//�Œ�h���@
//��1�s�F�@�������ǂ����@���̎R -----------------------------------------------------------
//-----��ꏬ��
Fa_F4(); //�t�@
delay_ms(T4); //�l����������
noSound();
Fa_F4(); //�t�@
delay_ms(T4); //�l����������
noSound();
Fa_F4(); //�t�@
delay_ms(T4); //�l����������
noSound();
//------���
So_G4(); //�\
delay_ms(T4*1.5);//�t�_�t�l����������
noSound();
La_A4(); //��
delay_ms(T4/2); //������������
noSound();
So_G4(); //�\
delay_ms(T4); //�l����������
noSound();
//-------��O����
La_A4(); //��
delay_ms(T4); //�l����������
noSound();
La_A4(); //��
delay_ms(T4); //�l����������
noSound();
La_sharpA4(); //�V�@�i#���j
delay_ms(T4); //�l����������
noSound();
//--------��l����
Do_C5(); //�h
delay_ms(T4*2); //��������
noSound();
delay_ms(T4); //�l���x��
//��2�s�@���ԂȒނ肵�@���̐� ---------------------------------------------------------
//--------��ꏬ��
La_sharpA4(); //#��
delay_ms(T4);
noSound();
Do_C5(); //�h
delay_ms(T4); //�l����������
noSound();
Re_D5(); //��
delay_ms(T4); //�l����������
noSound();
//---------���
La_A4(); //��
delay_ms(T4*1.5);//�t�_�t�l����������
noSound();
La_sharpA4(); //�V�@�i#���j
delay_ms(T4/2); //������������
noSound();
La_A4(); //��
delay_ms(T4);//�t�_�t�l����������
noSound();
//----------��O����
So_G4(); //�\
delay_ms(T4);//�t�_�t�l����������
noSound();
So_G4(); //�\
delay_ms(T4);//�t�_�t�l����������
noSound();
Mi_E4(); //��l�I�N�^�[�u�@�~ //E4
delay_ms(T4);//�t�_�t�l����������
noSound();
//-----------��l����
Fa_F4(); //�t�@
delay_ms(T4*2); //��������
noSound();
delay_ms(T4); //�l���x��
//��3�s�@�@���͍����@�߂����
//-----------��ꏬ��
So_G4(); //�\
delay_ms(T4/2);//������������
noSound();
Fa_F4(); //�t�@
delay_ms(T4/2); //������������
noSound();
So_G4(); //�\
delay_ms(T4);//�l����������
noSound();
Do_C4(); //�h
delay_ms(T4);//�l����������
noSound();
//------------���
Fa_F4(); //�t�@
delay_ms(T4/2); //������������
noSound();
So_G4(); //�\
delay_ms(T4/2);//������������
noSound();
La_A4(); //��
delay_ms(T4);//�l����������
noSound();
La_A4(); //��
delay_ms(T4);//�l����������
noSound();
//------------��O����
La_sharpA4(); //�V�@�i#���j
delay_ms(T4/2); // ������������
noSound();
La_A4(); //��
delay_ms(T4/2);//������������
noSound();
La_sharpA4(); //�V�@�i#���j
delay_ms(T4*1.5); //�t�_�t�l����������
noSound();
Re_D5(); //��
delay_ms(T4/2); //������������
noSound();
//-----------��l����
Do_C5(); //�h
delay_ms(T4/2); //��������
noSound();
La_sharpA4(); //�V�@�i#���j
delay_ms(T4/2); //������������
noSound();
La_A4(); //��
delay_ms(T4);//�l����������
noSound();
delay_ms(T4); //�l���x��
//��4�s�@�Y�ꂪ�����@�̋��i�ӂ邳�Ɓj
//---------��ꏬ��
Do_C5(); //�h
delay_ms(T4); //�l����������
noSound();
Do_C5(); //�h
delay_ms(T4); //�l����������
noSound();
Do_C5(); //�h
delay_ms(T4); //��������
noSound();
//----------���
Fa_F4(); //�t�@
delay_ms(T4*1.5); //�t�_�t�l����������
noSound();
So_G4(); //�\
delay_ms(T4/2);//������������
noSound();
La_A4(); //��
delay_ms(T4);//�l����������
noSound();
//----------��O����
La_sharpA4(); //�V�@�i#���j
delay_ms(T4); //�l����������
noSound();
La_sharpA4(); //�V�@�i#���j
delay_ms(T4); //�l����������
noSound();
So_G4(); //�\
delay_ms(T4);//�l����������
noSound();
//-----------��l����
Fa_F4(); //�t�@
delay_ms(T4*2); //��������
noSound();
delay_ms(T4); //�l���x��
///--------------------------------------------------------------------------------
delay_ms(1000);
}
return 0;
}
�@�����쌋�ʁ�
�@���d�X�s�[�J�ɂ��@PIC32MX795F512L��PWM����ɂ��@���́u�ӂ邳�Ɓv���@�^�������t�@�C���i*.aac�j�ł��B�@PC�ōĐ����ĕ����Ă��������B�B�@
���@���d�X�s�[�J�ɂ��@���́u�ӂ邳�Ɓv��PIC32MZ2048ECH100��
���d�l��
�@�E�@PIC32MZ�@�y�с@�n�[���j�[����������
�@�EPIC32MZ2048ECH100��OC5�iOutput Compare)���W���[����PWM����ɂ��A�@���L�̃P�C�^�C�Ȃǂł����Ă��鈳�d�X�s�[�J�������ď��̂����t����B
�@�@���c���쏊�@�@�@Piezoelectric Speaker�@�@�@VSLBP2115E1100-T1
�@�@�@�@�@�@�@�@�@�@�@�@Rated Frequency Range 200Hz to 20kHz
�@�@�@�@�@�@�@�@�@�@�@�@Sound Pressure Level 93.5dB�}3.0dB
�@�E���t����@���̂́u�ӂ邳�Ɓv�Ƃ��A���L�y���̒��i�w�����j�A�e���|�i80�j�A�����@�y�ыx�~������
�@�@���������ā@���d�X�s�[�J�̐����g���A�����ԁ@�y�ыx�~���ԓ��������t�̂��ƁB
�@�E�@�J�����F�@ver. 1.03 Harmony,�@ver. 1.34 XC32, �@ver. 2.30 MPLABX , �@revison.
5 PIC32MZ2048ECH100
������i��H�}���i����H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�

�@�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
//�ȉ��Amain.c
//------------------------------------------------------------------------------------------
/*******************************************************************************
MPLAB Harmony Project Main Source File
Company:
Microchip Technology Inc.
File Name:
main.c
Summary:
This file contains the "main" function for an MPLAB Harmony project.
Description:
This file contains the "main" function for an MPLAB Harmony project. The
"main" function calls the "SYS_Initialize" function to initialize the state
machines of all MPLAB Harmony modules in the system and it calls the
"SYS_Tasks" function from within a system-wide "super" loop to maintain
their correct operation. These two functions are implemented in
configuration-specific files (usually "system_init.c" and "system_tasks.c")
in a configuration-specific folder under the "src/system_config" folder
within this project's top-level folder. An MPLAB Harmony project may have
more than one configuration, each contained within it's own folder under
the "system_config" folder.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
//Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include <stddef.h> // Defines NULL
#include <stdbool.h> // Defines true
#include <stdlib.h> // Defines EXIT_FAILURE
#include "system/common/sys_module.h" // SYS function prototypes
// *****************************************************************************
// *****************************************************************************
// Section: Main Entry Point
// *****************************************************************************
// *****************************************************************************
int main ( void )
{
/* Initialize all MPLAB Harmony modules, including application(s). */
SYS_Initialize ( NULL );
while ( true )
{
/* Maintain state machines of all polled MPLAB Harmony modules. */
SYS_Tasks ( );
}
/* Execution should not come here during normal operation */
return ( EXIT_FAILURE );
}
/*******************************************************************************
End of File
*/
//�ȉ��Aapp.c
//----------------------------------------------------------------------------------------
/*******************************************************************************
MPLAB Harmony Application Source File
Company:
Microchip Technology Inc.
File Name:
app.c
Summary:
This file contains the source code for the MPLAB Harmony application.
Description:
This file contains the source code for the MPLAB Harmony application. It
implements the logic of the application's state machine and it may call
API routines of other MPLAB Harmony modules in the system, such as drivers,
system services, and middleware. However, it does not call any of the
system interfaces (such as the "Initialize" and "Tasks" functions) of any of
the modules in the system or make any assumptions about when those functions
are called. That is the responsibility of the configuration-specific system
files.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include "app.h"
#include "peripheral/oc/plib_oc.h" //���ꂪ�Ȃ��Ɓ@OC_ID_5���R���p�C���G���[
int delay_Clock = 200000000; //200MHz
int T4; //�l�������̎���[msec]
int tempo_speed = 80; //�e���|��80�@
void delay_us(volatile unsigned int usec) //1��sec�x��
{
volatile int count;
count = (int)(delay_Clock/20000000)*usec;
do //�����@at�@200MH (Clock=200000000)
{ //delay_us(1000)�F1000.4��sec delay_us(100)�F100.6��sec delay_us(10):10.5��sec�@�@delay_us(1)�F1.5��sec
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void delay_ms(volatile unsigned int msec) //1msec�x��
{
volatile unsigned int i; //�����Fat200MH (Clock=200000000)//delay_ms(1)�F 1.0006msec delay_ms(100)�F100.04msec
for(i=0; i<msec; i++)
delay_us(1000);
}
void BuzFreq(volatile int Freq, volatile float Duty) //PWM���g���A�@�f���[�e�B�̐ݒ��
{
volatile int myPR; //PWM�����̃��W�X�^�l( = PR2�@at Timer2)
volatile int myDuty; //PWM�o��ON���Ԃɑ������郌�W�X�^�l�i= OC1RS at OC1)
volatile float PS_T2 = 16; //�^�C�}2�̃v���X�P�[���l
//���2�̐ݒ�
PLIB_TMR_Stop(TMR_ID_2); // Disable Timer
PLIB_TMR_ClockSourceSelect(TMR_ID_2, TMR_CLOCK_SOURCE_PERIPHERAL_CLOCK); // Select clock source
PLIB_TMR_PrescaleSelect(TMR_ID_2, TMR_PRESCALE_VALUE_16); // Select prescalar value
PLIB_TMR_Mode16BitEnable(TMR_ID_2); // Enable 16 bit mode
PLIB_TMR_Counter16BitClear(TMR_ID_2); // Clear counter
//PWM����
//PR(PR���W�X�^�l�j = Fpbclk(�y���t�F�����o�X�N���b�N���g���j/Fpwm�iPWM���g���j/�^�C�}�v���X�P�[���l - 1;
myPR = (int)(100000000/Freq/PS_T2 -1);
PLIB_TMR_Period16BitSet(TMR_ID_2, myPR); //Set period
PLIB_TMR_Start(TMR_ID_2);
//OC5���W���[���̐ݒ�
PLIB_OC_ModeSelect(OC_ID_5, OC_COMPARE_PWM_EDGE_ALIGNED_MODE);
PLIB_OC_BufferSizeSelect(OC_ID_5, OC_BUFFER_SIZE_16BIT);
PLIB_OC_TimerSelect(OC_ID_5, OC_TIMER_16BIT_TMR2);
PLIB_OC_FaultInputSelect(OC_ID_5, OC_FAULT_DISABLE);
PLIB_OC_Buffer16BitSet(OC_ID_5, 0);
myDuty = (int)(PR2 * Duty); //OC1RS = (int)(PR2 * Duty);
PLIB_OC_PulseWidth16BitSet(OC_ID_5, myDuty);
}
void ClosePWM(void)
{
PLIB_TMR_Stop(TMR_ID_2);
}
void Do_C4(void) //��l�I�N�^�[�u�@�h //C4
{
BuzFreq(261.63,0.5);//�h //261.63Hz
}
void Re_D4(void) //��l�I�N�^�[�u�@���@�@//D4
{
BuzFreq(293.67,0.5); //���@//293.67Hz
}
void Mi_E4(void) //��l�I�N�^�[�u�@�~ //E4
{
BuzFreq(329.63,0.5); //�~�@//329.63Hz
}
void Fa_F4(void) //��l�I�N�^�[�u�@�t�@ //F4
{
BuzFreq(349.23,0.5); //�t�@ //349.23Hz
}
void Re_D6(void)
{
BuzFreq(800,0.5); //�� //587.34Hz
// BuzFreq(392.00,0.5); //�t�@ //349.23Hz
}
void _SoL1(void)
{
BuzFreq(392.00,0.5); //�t�@ //349.23Hz
}
void La_A4(void) //��l�I�N�^�[�u�@�� //A4
{
BuzFreq(440.00,0.7); //�� //440.00Hz
}
void La_sharpA4(void) //��l�I�N�^�[�u #���i�d�C�j�@//A#4
{
BuzFreq(466.16,0.7); //�� //466.16Hz
}
void Si_B4(void) //��l�I�N�^�[�u�@�V //B4
{
BuzFreq(493.88,0.4); //�V //493.88Hz
}
void Do_C5(void) //��܃I�N�^�[�u�@�h //C5
{
BuzFreq(523.23,0.5); //�h //523.23Hz
}
void Re_D5(void) //��܃I�N�^�[�u�@��
{
BuzFreq(587.34,0.5); //�� //587.34Hz
}
void noSound(void)
{
ClosePWM();
delay_ms(50);
}
// *****************************************************************************
// *****************************************************************************
// Section: Global Data Definitions
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
/* Application Data
Summary:
Holds application data
Description:
This structure holds the application's data.
Remarks:
This structure should be initialized by the APP_Initialize function.
Application strings and buffers are be defined outside this structure.
*/
APP_DATA appData;
// *****************************************************************************
// *****************************************************************************
// Section: Application Callback Functions
// *****************************************************************************
// *****************************************************************************
/* TODO: Add any necessary callback funtions.
*/
// *****************************************************************************
// *****************************************************************************
// Section: Application Local Functions
// *****************************************************************************
// *****************************************************************************
/* TODO: Add any necessary local functions.
*/
// *****************************************************************************
// *****************************************************************************
// Section: Application Initialization and State Machine Functions
// *****************************************************************************
// *****************************************************************************
/*******************************************************************************
Function:
void APP_Initialize ( void )
Remarks:
See prototype in app.h.
*/
void APP_Initialize ( void )
{
/* Place the App state machine in its initial state. */
appData.state = APP_STATE_INIT;
/* TODO: Initialize your application's state machine and other
* parameters.
*/
}
/******************************************************************************
Function:
void APP_Tasks ( void )
Remarks:
See prototype in app.h.
*/
void APP_Tasks ( void )
{
T4 = 750; // T4 = 60 * 1000 / 80; //�l�������̎��ԁi�����j T4 = 750 [msec]
/* Check the application's current state. */
switch ( appData.state )
{
/* Application's initial state. */
case APP_STATE_INIT:
{
// �֒���
//�Œ�h���@
//��1�s�F�@�������ǂ����@���̎R -----------------------------------------------------------
//-----��ꏬ��
Fa_F4(); //�t�@
delay_ms(T4); //�l����������
noSound();
Fa_F4(); //�t�@
delay_ms(T4); //�l����������
noSound();
Fa_F4(); //�t�@
delay_ms(T4); //�l����������
noSound();
//------���
_SoL1();//�\
delay_ms(1125);//�t�_�t�l����������
// delay_ms(T4*1.5);//�t�_�t�l����������
noSound();
La_A4(); //��
delay_ms(T4/2); //������������
noSound();
_SoL1();//�\
delay_ms(750);
// delay_ms(T4); //�l����������
noSound();
//-------��O����
La_A4(); //��
delay_ms(T4); //�l����������
noSound();
La_A4(); //��
delay_ms(T4); //�l����������
noSound();
La_sharpA4(); //�V�@�i#���j
delay_ms(T4); //�l����������
noSound();
//--------��l����
Do_C5(); //�h
delay_ms(T4*2); //��������
noSound();
delay_ms(T4); //�l���x��
//��2�s�@���ԂȒނ肵�@���̐� ---------------------------------------------------------
//--------��ꏬ��
La_sharpA4(); //#��
delay_ms(T4);
noSound();
Do_C5(); //�h
delay_ms(T4); //�l����������
noSound();
Re_D5(); //��
delay_ms(T4); //�l����������
noSound();
//---------���
La_A4(); //��
delay_ms(T4*1.5);//�t�_�t�l����������
noSound();
La_sharpA4(); //�V�@�i#���j
delay_ms(T4/2); //������������
noSound();
La_A4(); //��
delay_ms(T4);//�t�_�t�l����������
noSound();
//----------��O����
_SoL1();//�\
delay_ms(750);
// delay_ms(T4);//�t�_�t�l����������
noSound();
_SoL1();//�\
// while(1);
delay_ms(750);
// delay_ms(T4);//�t�_�t�l����������
noSound();
Mi_E4(); //��l�I�N�^�[�u�@�~ //E4
delay_ms(T4);//�t�_�t�l����������
noSound();
//-----------��l����
Fa_F4(); //�t�@
delay_ms(T4*2); //��������
noSound();
delay_ms(T4); //�l���x��
//��3�s�@�@���͍����@�߂����
//-----------��ꏬ��
_SoL1();//�\
delay_ms(T4/2);//������������
noSound();
Fa_F4(); //�t�@
delay_ms(T4/2); //������������
noSound();
_SoL1();//�\
delay_ms(T4);//�l����������
noSound();
Do_C4(); //�h
delay_ms(T4);//�l����������
noSound();
//------------���
Fa_F4(); //�t�@
delay_ms(T4/2); //������������
noSound();
_SoL1();//�\
delay_ms(T4/2);//������������
noSound();
La_A4(); //��
delay_ms(T4);//�l����������
noSound();
La_A4(); //��
delay_ms(T4);//�l����������
noSound();
//------------��O����
La_sharpA4(); //�V�@�i#���j
delay_ms(T4/2); // ������������
noSound();
La_A4(); //��
delay_ms(T4/2);//������������
noSound();
La_sharpA4(); //�V�@�i#���j
delay_ms(T4*1.5); //�t�_�t�l����������
noSound();
Re_D5(); //��
delay_ms(T4/2); //������������
noSound();
//-----------��l����
Do_C5(); //�h
delay_ms(T4/2); //��������
noSound();
La_sharpA4(); //�V�@�i#���j
delay_ms(T4/2); //������������
noSound();
La_A4(); //��
delay_ms(T4);//�l����������
noSound();
delay_ms(T4); //�l���x��
//��4�s�@�Y�ꂪ�����@�̋��i�ӂ邳�Ɓj
//---------��ꏬ��
Do_C5(); //�h
delay_ms(T4); //�l����������
noSound();
Do_C5(); //�h
delay_ms(T4); //�l����������
noSound();
Do_C5(); //�h
delay_ms(T4); //��������
noSound();
//----------���
Fa_F4(); //�t�@
delay_ms(T4*1.5); //�t�_�t�l����������
noSound();
_SoL1();//�\
// while(1);
delay_ms(T4/2);//������������
noSound();
La_A4(); //��
delay_ms(T4);//�l����������
noSound();
//----------��O����
La_sharpA4(); //�V�@�i#���j
delay_ms(T4); //�l����������
noSound();
La_sharpA4(); //�V�@�i#���j
delay_ms(T4); //�l����������
noSound();
_SoL1();//�\
while(1);
delay_ms(T4);//�l����������
noSound();
//-----------��l����
Fa_F4(); //�t�@
delay_ms(T4*2); //��������
noSound();
delay_ms(T4); //�l���x��
///--------------------------------------------------------------------------------
delay_ms(3000);
break;
}
/* TODO: implement your application state machine.*/
/* The default state should never be executed. */
default:
{
/* TODO: Handle error in application's state machine. */
break;
}
}
}
/*******************************************************************************
End of File
*/
//�ȉ��Asystem_init.c
//-----------------------------------------------------------------------------------
/*******************************************************************************
System Initialization File
File Name:
system_init.c
Summary:
This file contains source code necessary to initialize the system.
Description:
This file contains source code necessary to initialize the system. It
implements the "SYS_Initialize" function, configuration bits, and allocates
any necessary global system resources, such as the systemObjects structure
that contains the object handles to all the MPLAB Harmony module objects in
the system.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED AS IS WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include "system_config.h"
#include "system_definitions.h"
#include "app.h"
// ****************************************************************************
// ****************************************************************************
// Section: Configuration Bits
// ****************************************************************************
// ****************************************************************************
//�R���t�B�O
//-----------------------------------------------------------------------
//DEVCFG0���W�X�^
#pragma config EJTAGBEN = NORMAL
#pragma config DBGPER = ALLOW_PG2
#pragma config FSLEEP = OFF
#pragma config FECCCON = OFF_UNLOCKED
#pragma config BOOTISA = MIPS32
#pragma config TRCEN = OFF
#pragma config ICESEL = ICS_PGx2
#pragma config JTAGEN = OFF //JTAG �|�[�g Disable
#pragma config DEBUG = OFF
//----------------------------------------------------------------------
//DEVCFG1���W�X�^
#pragma config FNOSC = SPLL //PLL��H(�V�X�e��PLL�j�I�� //�V�X�e�����U��H //����FRC(8MHz�j�I���̏ꍇ�FFNOSC = FRCDIV //Oscillator Selection Bits (Fast RC Osc w/Div-by-N (FRCDIV))
#pragma config FDMTEN = OFF //�f�b�h�}���^�C�}�@OFF (Deadman Timer is disabled)
//#pragma config DMTINTV = WIN_127_128 // DMT Count Window Interval (Window/Interval value is 127/128 counter value)
#pragma config FSOSCEN = OFF // �����U��OFF //Secondary Oscillator Enable (Disable SOSC)
#pragma config IESO = OFF //�E�F�C�N�A�b�v����2�i���x�X�^�[�g�A�b�v�@// Internal/External Switch Over (Disabled)
#pragma config POSCMOD = EC //HS: �n�C�X�s�[�h���]�l�[�^���[�h // HS(High Speed Resonator Operation) Oscillator mode selected
//EC: �O�����U�� //EC(External Clock Input Operation) mode selected // Primary Oscillator Configuration (Primary osc disabled)
#pragma config OSCIOFNC = OFF //OSCCO�s���o�͖���
#pragma config FCKSM = CSECME //�N���b�N���U�F�ؑy�у��j�^�L�� //�唭�U�편�ׂ�FRC(�����������U��j�ɐؑ� //FSCM�iFail Safe Clock Monitor)����
#pragma config FWDTEN = OFF // �E�H�b�`�h�b�N�^�C�}�@OFF //Watchdog Timer Disable
//#pragma config WDTPS = PS1048576 // Watchdog Timer Postscaler (1:1048576)
//#pragma config WDTSPGM = STOP // Watchdog Timer Stop During Flash Programming (WDT stops during Flash programming)
//#pragma config WINDIS = NORMAL // Watchdog Timer Window Mode (Watchdog Timer is in non-Window mode)
//#pragma config FWDTWINSZ = WINSZ_25 // Watchdog Timer Window Size (Window size is 25%)
//--------------------------------------------------------------------------------------------------------------------
// DEVCFG2���W�X�^
//�V�X�e���N���b�N�F200MHz
//�y���t�F�������g���F//default: 100MHz //PBxDIV��8�n�����ɐݒ�ύX��
//PBxDIV: PERIPHERAL BUS CLOCK DIVISOR CONTROL ���W�X�^��PBDIV<6:0>: Peripheral Bus Clock Divisor Control �r�b�g�Őݒ�
#pragma config FPLLRNG = RANGE_5_10_MHZ //PLL Input���g�����͔͈͐ݒ�// System PLL Input Range (5-10 MHz Input) �@//8(= 24/3)MHz��
#pragma config FPLLIDIV = DIV_3 //PLL���͑��ł̕����F 1/3 // PLL�@Input���g�� = 24MH���@���@3�@���@8MHz // System PLL Input Divider (1x Divider)
//#pragma config FPLLICLK = PLL_POSC //�唭�U��H�I���@//����FRC�i8MHz�j�̏ꍇ��FPLLICLK = PLL_FRC// System PLL Input Clock Selection (POSC is input to the System PLL)
#pragma config FPLLICLK = PLL_FRC //�����������U��I�� //�������@�o�O�L�@�唭�U��H�I���̎��AFPLLICLK = PLL_POSC�ł͂Ȃ�FPLLICLK = PLL_FRC��I������B(at ver.1.33 XC32)
#pragma config FPLLMULT = MUL_50 //PLL�{���F50�{�@//8MHz x 50 = 400MHz //System PLL Multiplier (PLL Multiply by 50)
#pragma config FPLLODIV = DIV_2 //PLL�o�͑��ł̕����F 1/2 //�V�X�e���N���b�N�@=�@400MHz ���@2�@=�@200MH��
#pragma config UPLLFSEL = FREQ_24MHZ //USB��PLL���͂��@24MHz��12MHz�ɕϊ��@// USB PLL Input Frequency Selection (USB PLL input is 12 MHz)
#pragma config UPLLEN = ON //USB��PLL�ϊ��F�C�l�[�u���@// USB PLL Enable (USB PLL is enabled)
//--------------------------------------------------------------------------------------------------------------------------
//DEVCFG3���W�X�^
#pragma config USERID = 0xffff
#pragma config FMIIEN = ON
#pragma config FETHIO = ON
#pragma config PGL1WAY = ON
#pragma config PMDL1WAY = ON
#pragma config IOL1WAY = ON
#pragma config FUSBIDIO = ON
/*** BF1SEQ0 ***/
#pragma config TSEQ = 0xffff
#pragma config CSEQ = 0xffff
// *****************************************************************************
// *****************************************************************************
// Section: Library/Stack Initialization Data
// *****************************************************************************
// *****************************************************************************/
// *****************************************************************************
// *****************************************************************************
// Section: Driver Initialization Data
// *****************************************************************************
// *****************************************************************************
//<editor-fold defaultstate="collapsed" desc="DRV_Timer Configuration">
// </editor-fold>
// *****************************************************************************
// *****************************************************************************
// Section: System Data
// *****************************************************************************
// *****************************************************************************
/* Structure to hold the object handles for the modules in the system. */
SYSTEM_OBJECTS sysObj;
// *****************************************************************************
// *****************************************************************************
// Section: Module Initialization Data
// *****************************************************************************
// *****************************************************************************
//<editor-fold defaultstate="collapsed" desc="SYS_DEVCON Configuration">
/*** System Device Control Initialization Data ***/
const SYS_DEVCON_INIT sysDevconInit =
{
.moduleInit = {0},
};
// </editor-fold>
// *****************************************************************************
// *****************************************************************************
// Section: Static Initialization Functions
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
// Section: System Initialization
// *****************************************************************************
// *****************************************************************************
/*******************************************************************************
Function:
void SYS_Initialize ( SYS_INIT_DATA *data )
Summary:
Initializes the board, services, drivers, application and other modules.
Remarks:
See prototype in system/common/sys_module.h.
*/
void SYS_Initialize ( void* data )
{
/* Core Processor Initialization */
SYS_CLK_Initialize( NULL );
sysObj.sysDevcon = SYS_DEVCON_Initialize(SYS_DEVCON_INDEX_0, (SYS_MODULE_INIT*)&sysDevconInit);
SYS_DEVCON_PerformanceConfig(SYS_CLK_SystemFrequencyGet());
SYS_PORTS_Initialize();
/* Initialize Drivers */
/*Initialize TMR0 */
DRV_TMR0_Initialize();
DRV_TMR0_Start();
/*Initialize OC0 */
DRV_OC0_Initialize();
DRV_OC0_Enable();
/* Initialize System Services */
/* Initialize Middleware */
/* Initialize the Application */
APP_Initialize();
}
/*******************************************************************************
End of File
*/
//�ȉ��Adrv_oc_static.c
//----------------------------------------------------------------------------
/*******************************************************************************
OC Driver Functions for Static Single Instance Driver
Company:
Microchip Technology Inc.
File Name:
drv_oc_static.c
Summary:
OC driver implementation for the static single instance driver.
Description:
The OC device driver provides a simple interface to manage the OC
modules on Microchip microcontrollers.
Remarks:
Static interfaces incorporate the driver instance number within the names
of the routines, eliminating the need for an object ID or object handle.
Static single-open interfaces also eliminate the need for the open handle.
*******************************************************************************/
//DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED AS IS WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTOCULAR PURPOSE.
IN NO EVENT SHALL MOCROCHIP OR ITS LOCENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STROCT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVOCES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
//DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Header Includes
// *****************************************************************************
// *****************************************************************************
#include "peripheral/oc/plib_oc.h"
// *****************************************************************************
// *****************************************************************************
// Section: Instance 0 static driver functions
// *****************************************************************************
// *****************************************************************************
void DRV_OC0_Initialize(void)
{
/* Setup OC0 Instance */
PLIB_OC_ModeSelect(OC_ID_5, OC_COMPARE_PWM_EDGE_ALIGNED_MODE);
PLIB_OC_BufferSizeSelect(OC_ID_5, OC_BUFFER_SIZE_16BIT);
PLIB_OC_TimerSelect(OC_ID_5, OC_TIMER_16BIT_TMR2);
PLIB_OC_FaultInputSelect(OC_ID_5, OC_FAULT_DISABLE);
PLIB_OC_Buffer16BitSet(OC_ID_5, 0);
PLIB_OC_PulseWidth16BitSet(OC_ID_5, 10);
}
void DRV_OC0_Enable(void)
{
PLIB_OC_Enable(OC_ID_5);
}
void DRV_OC0_Disable(void)
{
PLIB_OC_Disable(OC_ID_5);
}
void DRV_OC0_Start(void)
{
PLIB_OC_Enable(OC_ID_5);
}
void DRV_OC0_Stop(void)
{
PLIB_OC_Disable(OC_ID_5);
}
bool DRV_OC0_FaultHasOccurred(void)
{
return PLIB_OC_FaultHasOccurred(OC_ID_5);
}
/*******************************************************************************
End of File
*/
//�ȉ��Adrv_tmr_static.c
//--------------------------------------------------------------------------------
/*******************************************************************************
Timer Static Driver File
File Name:
drv_tmr_static.c
Company:
Microchip Technology Inc.
Summary:
Timer driver implementation for the static single instance driver.
Description:
The Timer device driver provides a simple interface to manage the Timer
modules on Microchip microcontrollers.
Remarks:
None
*******************************************************************************/
/*******************************************************************************
Copyright (c) 2014 released Microchip Technology Inc. All rights reserved.
Mirochip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a MTMRrochip mTMRrocontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublTMRense terms in the accompanying lTMRense agreement).
You should refer to the lTMRense agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED AS IS WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTTMRULAR PURPOSE.
IN NO EVENT SHALL MTMRROCHIP OR ITS LTMRENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRTMRT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVTMRES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// *****************************************************************************
// *****************************************************************************
// Header Includes
// *****************************************************************************
// *****************************************************************************
#include "framework/driver/tmr/drv_tmr_static.h"
// *****************************************************************************
// *****************************************************************************
// Section: Instance 0 static driver functions
// *****************************************************************************
// *****************************************************************************
void DRV_TMR0_Initialize(void)
{
/* Initialize Timer Instance0 */
/* Disable Timer */
PLIB_TMR_Stop(TMR_ID_2);
/* Select clock source */
PLIB_TMR_ClockSourceSelect(TMR_ID_2, TMR_CLOCK_SOURCE_PERIPHERAL_CLOCK);
/* Select prescalar value */
PLIB_TMR_PrescaleSelect(TMR_ID_2, TMR_PRESCALE_VALUE_256);
/* Enable 16 bit mode */
PLIB_TMR_Mode16BitEnable(TMR_ID_2);
/* Clear counter */
PLIB_TMR_Counter16BitClear(TMR_ID_2);
/*Set period */
PLIB_TMR_Period16BitSet(TMR_ID_2, 0);
}
inline void DRV_TMR0_Start(void)
{
/* Start Timer*/
PLIB_TMR_Start(TMR_ID_2);
}
inline void DRV_TMR0_Stop(void)
{
// Stop Timer
PLIB_TMR_Stop(TMR_ID_2);
}
inline void DRV_TMR0_CounterClear(void)
{
// Clear 16-bit counter value
PLIB_TMR_Counter16BitClear(TMR_ID_2);
}
void DRV_TMR0_CounterValueSet(uint32_t value)
{
// Set 16-bit counter value
PLIB_TMR_Counter16BitSet(TMR_ID_2, (uint16_t)value);
}
uint32_t DRV_TMR0_CounterValueGet(void)
{
// Get 16-bit counter value
return (uint32_t) PLIB_TMR_Counter16BitGet(TMR_ID_2);
}
/*******************************************************************************
End of File
*/
//�ȉ��Asys_ports_static.c
//-------------------------------------------------------------------------------
/*******************************************************************************
SYS PORTS Static Functions for PORTS System Service
Company:
Microchip Technology Inc.
File Name:
sys_ports_static.c
Summary:
SYS PORTS static function implementations for the Ports System Service.
Description:
The Ports System Service provides a simple interface to manage the ports
on Microchip microcontrollers. This file defines the static implementation for the
Ports System Service.
Remarks:
Static functions incorporate all system ports configuration settings as
determined by the user via the Microchip Harmony Configurator GUI. It provides
static version of the routines, eliminating the need for an object ID or
object handle.
*******************************************************************************/
//DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED AS IS WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
//DOM-IGNORE-END
#include "system_config.h"
#include "peripheral/ports/plib_ports.h"
#include "peripheral/int/plib_int.h"
void SYS_PORTS_Initialize(void)
{
//RD9���@OC5�ɐݒ�
TRISDbits.TRISD9 = 0; //RD9 �o���߰Ăɐݒ�
/* PPS Input Remapping */ //���}�b�v
PLIB_PORTS_RemapOutput(PORTS_ID_0, OUTPUT_FUNC_OC5, OUTPUT_PIN_RPD9 ); //RD5��OC5��ݒ�
}
/*******************************************************************************
End of File
*/
�@�����쌋�ʁ�
�@���d�X�s�[�J�ɂ��@PIC32MX795F512L��PWM����ɂ��@���́u�ӂ邳�Ɓv���@�^�������t�@�C���i_*.aac�j�ł��B�@PC�ōĐ����ĕ����Ă��������B�B�@
�@
�@�@�@�@�@